Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

а также имеет место

где Кr – коэффициент эффективности управления системы ЖРД-аппарат.
В предположении, что

F2(?) примет вид

Частотная характеристика разомкнутого контура управления траекторией полета может быть представлена в виде
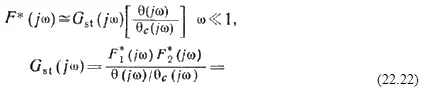
где

В области низких частот, где применима функция Gst(j?), влияние управления траекторией на характеристики разомкнутого контура ЦАП можно аппроксимировать путем прибавления Gst(j?) к единичному коэффициенту обратной связи по углу ориентации

Следует заметить, что выражение H(j?) является хорошей аппроксимацией только для низких значений ?, меньше 0,2 рад/сек. Однако именно этот диапазон частот представляет наибольший интерес при анализе эффектов управления траекторией полета.
Стабилизация корабля Apollo
Необходимость стабилизации корабля при возникновении изгибных колебаний или плескания жидкости является одним из основных требований, предъявляемых к ЦАП.
Для стабилизации корабля как твердого тела в ЦАП были приняты следующие значения запасов устойчивости:
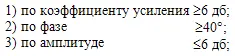
Указанные значения критериев устойчивости выбраны в предположении, что коэффициент усиления автопилота автоматически изменяется и компенсирует изменение характеристик цепи ЖРД-аппарат при выгорании топлива.
Для стабилизации корабля при возникновении изгибных колебаний или плескания жидкости в передаточной функции вводятся сомножители, расположенные вблизи от мнимой оси и соответствующих нулей.
Коэффициент усиления разомкнутой системы пропорционален произведению коэффициента усиления фильтра ЦАП Kz и квазистатического коэффициента цепи ЖРД-аппарат Kg, где

– передаточная функция ЖРД-аппарат.(22.26)
Kg зависит от количества топлива и изменяется по мере его выгорания. Эти изменения компенсируются обратнопропорциональным изменением коэффициента Kz, так чтобы общий коэффициент усиления контура оставался неизменным.
Таким образом устойчивость корабля как твердого тела при возникновении изгибных колебаний и плескании жидкости обеспечивается выбором компенсирующего фильтра.
На режиме широкого диапазона работыфильтр обеспечивает стабилизацию корабля от изгибных колебаний путем создания фазового запаздывания на низких частотах и затухания на высоких частотах.
Стабилизация корабля от плескания жидкости осуществляется за счет создания фильтром фазового опережения.
Компенсирующий фильтр обеспечивает стабилизацию корабля за счет фазового запаздывания при изгибных колебаниях с частотами ниже 8,4 рад/сек. При этом запас устойчивости на резонансной частоте составляет 35°.
На режиме широкого диапазона работы обеспечивается стабилизация корабля при возникновении любых плесканий жидкости в баках корабля. Этот случай соответствует номинальным условиям – полному заполнению баков корабля.
Максимальная частота плескания жидкости, при которой обеспечивается стабилизация корабля, составляет 4,075 рад/сек, что на 20% превышает максимум частоты для номинальных условий, равный 3,4 рад/сек.
На режиме узкого диапазона работыфильтр обеспечивает стабилизацию корабля от высокочастотных плесканий жидкости при неполных баках созданием затухания до 57 дб. Стабилизация корабля от частоты плескания жидкости, которая ниже 2,08 рад/сек, осуществляется за счет фазового запаздывания. Затухание изгибных колебаний осуществляется более чем на 100 дб.
Параметры конструкции цифрового автопилота
Для обоих конфигураций летательного аппарата, корабля Apollo и основного блока в ЦАП используется компенсирующий фильтр шестого порядка, состоящий из трех каскадных секций второго порядка.
В ЦАП корабля Apollo используются все 3 секции, на основном блоке только 2. Структура и параметры компенсирующих фильтров ЦАП представлены на рис. 22.4.
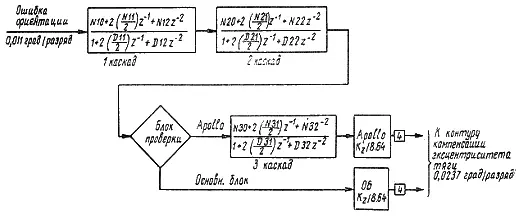
Рис. 22.4. Структурная схема компенсирующего фильтра шестого порядка цифрового автопилота.
В табл. 17 приведены численные значения параметров контуров управления траекторией полета и компенсации эксцентриситета вектора тяги [20].
Т аблица 17

2.3. Ручное управление кораблем Apollo
На всех этапах полета корабля Apollo, а также в критических и аварийных ситуациях управление кораблем может осуществляться астронавтами вручную. Система ручного управления обеспечивает стабилизацию полета по курсу, координированные развороты, команды на ориентацию и перемещение корабля в пространстве.
Отличительная особенность ручного управления лунного корабля в сравнении с другими летательными аппаратами состоит в том, что его динамические характеристики изменяются в широких пределах.
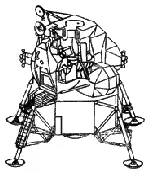
Рис. 23.1. Лунный корабль (посадочная конфигурация).

Рис. 23.2. Взлетная ступень.
Лунный корабль управляется вручную во всех трех конфигурациях (рис. 23.1, 2, 3). В посадочной конфигурации один лунный корабль с полным запасом топлива весит 15 т и имеет моменты инерции относительно осей крена, тангажа и рыскания 34 000; 33 900 и 31 200 кг·м? соответственно, когда израсходована половина запаса топлива. Моменты инерции уменьшаются до 20 300; 16 800; 16 200 кг·м? при полностью израсходованном топливе посадочной ступени. Взлетная ступень лунного корабля весит 4900 кг с полным запасом топлива и 2600 кг, когда топливо израсходовано. Начальные моменты инерции 8250; 4700 и 9100 кг·м? уменьшаются после израсходования топлива до 2800; 3900 и 4400 кг·м?.
Читать дальшеИнтервал:
Закладка: