Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Общее описание работы цифрового автопилота
На активных участках траектории полета управление аппаратом по каналам тангажа и рыскания осуществляется отклонением на кардане ЖРД служебного отсека. Управление ориентацией по каналу крена производится ЖРД реактивной системы управления. Расчет команд на отклонение вектора тяги для компенсации ошибок между требуемой и измеренной ориентацией является функцией управления вектором тяги цифрового автопилота.
Управление вектором тяги ЦАП по каналам тангажа и рыскания осуществляется следующим образом.
1. В контуре управления траекторией полета бортовой ЭЦВМ командного отсека подсчитываются приращения углов ориентации в инерциальной системе координат и преобразуются в координаты, связанные с аппаратом.
2. Блок преобразования данных измеряет углы кардана блока инерциальных измерений и формирует импульсы, представляющие малые фиксированные приращения этих углов. Приращения углов суммируются в бортовой ЭЦВМ командного отсека и отсылаются в регистр блока преобразования данных.
3. В регистре блока преобразования данных, в соответствии с программой ЦАП производится квантование и по обратной разности углов блока преобразования данных на каждом интервале находятся малые приращения.
4. Приращения величин в блоке преобразования данных на каждом интервале квантования преобразуются в координаты, связанные с аппаратом, и вычитаются из командных приращений, которые вырабатываются по программе управления траекторией полета.
5. Полученная разность представляет собой приращение ошибок ориентации; эти приращения суммируются и дают ошибку ориентации в координатах, связанных с аппаратом. Небольшие ошибки начальной ориентации, возникающие в результате выполнения маневра осадки топлива перед запуском ЖРД служебного отсека не учитываются и обнуляются в регистре ЦАП Apollo перед запуском ЖРД. Это делается с той целью, чтобы исключить возбуждаемые начальными ошибками изгибные колебания Apollo. Когда лунный корабль отстыкован от основного блока, проблемы изгибных колебаний не возникает и начальные ошибки ориентации учитываются точно.
6. Ошибки ориентации поступают в фильтры компенсации каналов тангажа и рыскания ЦАП, в которых вырабатываются команды сервомотором кардана ЖРД для углов тангажа и рыскания (рис. 22.1). Эти компенсирующие сигналы должны также обеспечить демпфирование изгибных колебаний аппарата и колебаний в результате плескания топлива.
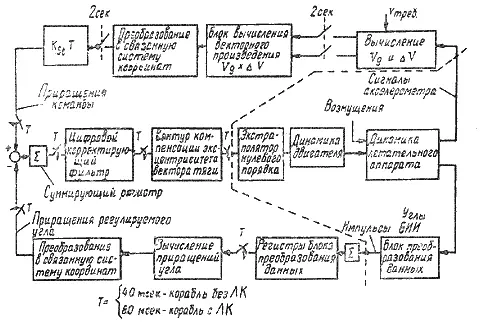
Рис. 22.1. Функциональная блок-схема управления вектором тяги в плоскости тангажа (или рыскания).
7. ЦАП Apollo имеет два компенсирующих режима работы: первый с широким диапазоном для стабилизации аппарата от плескания при полной заправке, требующейся для полета на Луну, второй – узкий диапазон для стабилизации от плескания топлива при любых заправках. ЦАП начинает управление вектором тяги в широком диапазоне и остается на этом режиме до тех пор, пока астронавт не переключит его на режим работы в узком диапазоне. Он осуществляет переключение с помощью кодового слова, набираемого на клавишах пульта управления. Это переключение астронавт осуществляет, когда плескание топлива приводит к чрезмерным колебаниям ЖРД. Таким образом извлекается максимум преимуществ из широкого диапазона в начале неустойчивого режима управления вектором тяги.
8. ЦАП командного и служебного отсеков имеет только один компенсирующий режим работы.
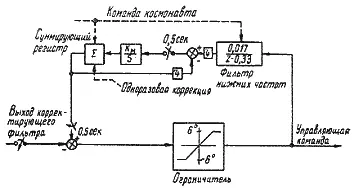
Рис. 22.2. Функциональная блок-схема контура коррекции эксцентриситета тяги в плоскости тангажа (или рыскания).
9. Как показано на рис. 22.2, суммарный командный сигнал к каждому серводвигателю кардана складывается из сигнала компенсирующего фильтра и сигнала контура коррекции смещения вектора тяги. Последняя составляющая смещает суммарный командный сигнал таким образом, что при нулевом выходе из компенсирующего фильтра вектор тяги проходил бы точно через центр тяжести, если отсутствует движение центра тяжести и вектора тяги относительно командного угла.
10. Контур управления вектором тяги состоит из двух главных элементов – суммирующего регистра, выдающего смещение, и низкочастотного фильтра, проводящего суммарный командный сигнал с частотой квантования ЦАП. Разность между величиной смещения и выходным сигналом низкочастотного фильтра вводится на суммирующий регистр каждые 0,5 сек с тем, чтобы медленно корректировать ошибки регулирования, вызванные эксцентриситетом вектора тяги. Это в некоторой степени эквивалентно введению пропорционально-интегральной передаточной функции между компенсирующим фильтром и суммарным сигналом управления.
Контур управления вектором тяги работает таким образом, что его сигналы не возбуждают колебаний топлива и изгибных колебаний и мало влияют на устойчивость космического аппарата как твердого тела.
11. Астронавт задает начальные условия суммирующему регистру контура коррекции смещения вектора тяги и низкочастотному фильтру перед началом управления вектором тяги. Позднее начальные условия суммирующему регистру задают снова, чтобы осуществить так называемую одноразовую корреляцию.
12. Если ЦАП управляет основным блоком, величина в суммирующем регистре контура коррекции смещения вектора тяги не изменяется до осуществления одноразовой коррекции через 3 сек после запуска ЖРД. Эта коррекция состоит в добавлении к содержимому суммирующего фильтра удвоенного изменения выходного сигнала низкочастотного фильтра (удвоение сигнала необходимо для компенсации запаздывания фильтра).
Следуя такой коррекции, содержимое суммирующего фильтра контура коррекции смещения вектора тяги изменяется каждые 0,5 сек, как показано на рис. 22.3.
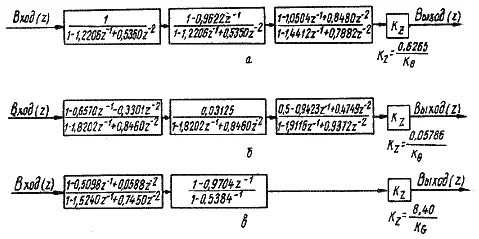
Рис. 22.3. Структурная схема компенсирующего фильтра цифрового автопилота: а – корабль Apollo, широкий диапазон работы; б – корабль Apollo, узкий диапазон работы; в – основной блок
13. В ЦАП Apollo возрастание содержимого в суммирующем регистре контура коррекции смещения вектора тяги начинается с момента запуска ЖРД. Однако суммирующий регистр обнуляется при переключении режимов на текущее значение выходного сигнала низкочастотного фильтра. Предполагается, что переключение происходит после начального неустановившегося режима низкочастотного фильтра. При переключении режимов низкочастотный фильтр обнуляется и поступающая на сервомоторы команда сдвигается к сигналу суммирующего регистра контура коррекции смещения вектора тяги. После переключения контур коррекции смещения вектора тяги продолжает работать с теми же коэффициентом усиления, частотой квантования и постоянной времени низкочастотного фильтра.
Читать дальшеИнтервал:
Закладка: