Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Частота квантования ЦАП,

выбирается таким образом, чтобы ее половина значительно превышала резонансные частоты колебаний корабля Apollo и основного блока.
Из характеристик G (ju) или G*(j?)), выделяя сомножители, обусловленные изгибными колебаниями и плесканием жидкости, получим чистую характеристику аппарата, как твердого тела Gr(ju) или С*r(j?). Компенсирующие звенья могут быть спроектированы на основе произведения D(ju)Gr(ju), эквивалентного D*(j?) G*r(j?), с добавлением к этим частотным характеристикам функций влияния плескания топлива и изгибных колебаний при различных количествах топлива в баках.
Процесс проектирования упрощается использованием программы для вычислительной машины, которая строит амплитудные и фазовые характеристики D(ju)Gr(ju) в функции
?=(2/T)tg^-1u (22.10)
В результате получаются графики D*(j?) G*r(j?), которые модифицируются с помощью функций M(j?) и Н(j?) для определения разомкнутой частотной характеристики аппарата как твердого тела
G0r(j?)=D*(j?) M(j?) G*r(j?)Н (j?) (22.11)
Контур компенсации эксцентриситета вектора тяги
Влияние контура компенсации эксцентриситета вектора тяги на характеристики разомкнутой цепи ЦАП по конструктивным соображениям ограничивается областью ниже 2 рад/сек. Это значительно ниже частоты квантования интегратора этого контура, равной 2 гц (12,56 рад/сек), и частоты квантования ЦАП (25 гц для основного блока и 12,5 гц для корабля Apollo). Можно показать, что влияние указанных частот квантования пренебрежимо мало в диапазоне частот до 2 рад/сек, и контур компенсации эксцентриситета вектора тяги может быть аппроксимирован передаточной функцией непрерывного сигнала вида

где Км – коэффициент усиления контура компенсации эксцентриситета вектора тяги;
Тм – постоянная времени низкочастотного фильтра.
Контур управления траекторией полета
Динамика контура управления траекторией полета зависит от времени до окончания работы ЖРД, tgo. Для больших значений tgo этой зависимостью можно пренебречь при выводе передаточных функций контура управления траекторией полета. Эти функции даже в приближенном виде весьма полезны для понимания влияния контура управления траекторией полета на работу ЦАП в целом.
Контур управления траекторией полета выполняет следующие операции.
1. Приращения скорости, измеряемые акселерометром, накапливаются и вычисляется текущая скорость V;
2. Каждые 2 сек вычисляется разность Vg между требуемой скоростью Vr и текущей скоростью V.
3. Каждые 2 сек находится векторное произведение Vg и ?V, где ?V – изменение скорости в течение последних 2 сек.
4. Результат векторного произведения нормируется по отношению Vg и ?V и затем умножается на коэффициент усиления Ksteer для получения вектора команды скорости ориентации.
5. Вектор угловой скорости ориентации преобразуется п-систему координат, связанных с аппаратом, и определяются команды для угловых скоростей тангажа и рыскания.
6. Управляющие команды по угловой скорости аппарата умножаются на период квантования ЦАП Т, чтобы получить-приращения, которые подаются в ЦАП через каждые Т сек.
Приближенные аналитические соотношения, описывающие-динамику контура управления траекторией полета выводятся при следующих допущениях:
1) все тригонометрические функции заменяются их приближенными значениями для малых углов;
2) аппарат рассматривается как твердое тело с инерци-альной измерительной платформой, установленной в центре тяжести;
3) эффекты квантования пренебрежимо малы;
4) ось X аппарата и ось ЖРД первоначально выставлены параллельно вектору скорости Vr; в этом случае угол между вектором тяги и вектором Vr определяется как ? – ? (? – ориентация аппарата относительно вектора Vr, ? – отклонение ЖРД от начального направления; считается положительным, если создает положительное ускорение ?);
5) время tgo постоянно;
6) вектор Vr постоянен по величине и направлению;
7) запаздывание при вычислении в контуре управления траекторий полета пренебрежимо мало.
При сделанных допущениях угол между вектором тяги и вектором требуемой скорости определяется как ? – ?, а соответствующие углы в плоскости тангажа и в плоскости рыскания для векторов Vg и ?V аппроксимируются выражениями
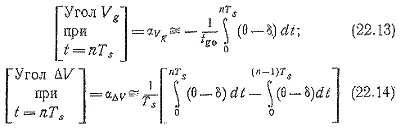
(Ts – период квантования контура управления траекторией полета 2 сек).
Нормированное векторное произведение векторов Vg и ?V дает разность ?vg – ??V, которая после умножения на коэффициент усиления Kst дает сигнал по угловой скорости ориентации .
Эта команда по угловой скорости поступает в ЦАП в виде приращения ?cT, находится разность между командным и измеренным приращением для определения ошибки ориентации.
Таким образом, ?c образуется путем квантования с периодом 2 сек непрерывного интеграла от ?—? и последовательного преобразования в приращения, которые суммируются на интервале в Т сек. Такая комбинация двух периодов квантования и аналогичного интегрирования усложняет задачу учета влияния контура управления траекторией полета на устойчивость ЦАП.
Для упрощения анализа влияния управления траекторией полета автопилот можно рассматривать как элемент с непрерывным сигналом в контуре управления траекторией полета. Тогда остается только одна частота квантования 0,5 гц, связанная с формированием управляющего сигнала ?c. Частотную характеристику разомкнутого контура управления траекторией полета можно представить ?-преобразованием

где F1(?)-преобразование
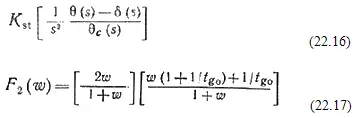
F2(?) представляет процесс получения угла векторного произведения ?vg – ??V из интеграла (?—?); F1(?) описывает умножение этого угла на коэффициент усиления Kst для получения ?c, последующее интегрирование ?c для получения ?c', образования разности (?—?) автопилотом и ее интегрирование.
Взаимное влияние автопилота и процесса управления траекторией полета проявляется более наглядно с помощью приближенного аналитического метода, заключающегося в добавлении к частотной характеристике разомкнутого контура ЦАП влияния управления траекторией полета.
При этом предполагается, что эффекты транспонирования частот отсутствуют и частотная характеристика F1(?) может быть заменена частотной характеристикой в области реальных частот
Читать дальшеИнтервал:
Закладка: