Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Управление полетом Apollo цифровым автопилотом
На пассивных участках траектории полета при отсутствии больших действующих на корабль сил задачей ЦАП является управление ориентацией с помощью РСУ.
Стабилизация корабля
Сохранение заданной ориентации – стабилизация корабля – осуществляется ЦАП с помощью управления соленоидными топливными клапанами ЖРД РСУ непосредственно по информации об ошибках ориентации и угловой скорости ориентации. Сигналы ошибок ориентации блока преобразования данных преобразуются из цифровой в аналоговую форму для привода стрелочных указателей ошибок ориентации на шаровом индикаторе полета.
Главным в режиме стабилизации корабля является определение ЦАП угловой скорости ориентации; от точности расчета угловой скорости зависит экономия топлива и способность системы сохранить ошибки ориентации в пределах зоны нечувствительности.
Автоматическое изменение ориентации корабля
ЦАП, управляя маневром ориентации корабля Apollo, использует ту же самую логику, которая применяется на режиме стабилизации, но с дополнением команд по угловой скорости (рис. 32.4). Выработка маневра ориентации выполняется в 2 этапа. Вначале на базе текущей ориентации и требуемой, определяемой экипажем или бортовой ЭЦВМ, находится ось, относительно которой одним вращением будет достигнута требуемая ориентация. Одновременно определяется, не приведет ли рассматриваемый маневр к замыканию рамок кардана блока инерциальных измерений. Если замыкание может произойти, то оси вращения выбираются так, чтобы обойти зону замыкания. Обычно в конце необходимо сделать крен для окончания маневра. В обоих случаях результатом расчета является направление, относительно которого вращается корабль, и угол поворота.
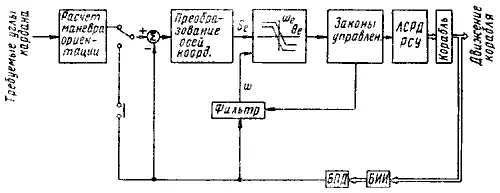
Рис. 32.4. Блок-схема цифрового автопилота, пассивный полет, управление стабилизацией корабля.
Во втором этапе расчета вырабатывается переходная матрица, равная произведению матрицы, соответствующей начальному стабилизированному положению, и трансформирующей матрицы. Это преобразование производится один раз в расчетном цикле.
Управление кораблем Apollo на активном участке траектории полета
ЦАП на активных участках траектории полета вырабатывает команды на управление вектором тяги а т и осуществляет управление ориентацией корабля и вектора тяги в соответствии с вырабатываемыми командами.
Так как вектор тяги а т ориентирован в среднем вблизи продольной оси корабля, управление на активных участках сводится к управлению ориентацией корабля. Непосредственно перед включением ЖРД ЦАП с помощью ЖРД РСУ удерживает ориентацию в пределах узкой зоны нечувствительности. Предварительно ЦАП компенсирует смещение вектора тяги ЖРД, направляя ось тяги через центр тяжести корабля, определяется время зажигания ЖРД, перед зажиганием включаются ЖРД РСУ для осадки топлива в баках. С момента зажигания ЦАП управляет направлением вектора тяги, отклоняя ЖРД на кардане. ЖРД РСУ осадки топлива выключаются, когда ЖРД главной двигательной установки разовьет полную тягу.
В период действия тяги команда по угловой скорости ориентации корабля пропорциональна углу между Vg и а т (или —Vg). ЦАП вырабатывает 3 независимых сигнала ошибок ориентации и управляет тангажом, рысканием и креном корабля, сводя к нулю эти ошибки.
Управление креном осуществляется с помощью ЖРД РСУ. При управлении вектором тяги по тангажу и рысканию должны обеспечиваться стабилизация корабля, малые ошибки по скорости при выключении ЖРД, ограниченные отклонения ориентации корабля, чтобы минимизировать расход топлива и износ муфт сервомотора кардана.
На рис. 32.5 представлена блок-схема одного канала ЦАП. Для простоты считалось, что команда по угловой скорости ?с уже преобразована к координатам, связанным с аппаратом. Роль ЦАП в этом случае заключается в выполнении динамических фильтрующих операций по выбору ошибок ориентации е требуемых для выработки команд сервомотору кардана и осуществления управления по этим командам.
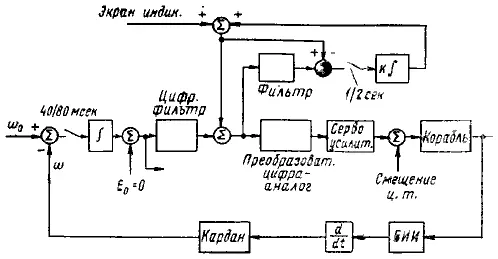
Рис. 32.5. Блок-схема цифрового автопилота, управление кораблем Apollo на активных участках траектории полета
Программа бортовой ЭЦВМ управления траекторией полета корабля Apollo
Программа бортовой ЭЦВМ управления траекторией полета ракеты-носителя Saturn V и корабля Apollo разделена на функциональные спецпрограммы в соответствии с последовательностью этапов полета на Луну: предстарт, старт, навигация, целеуказание, маневры на активных участках траектории, выставка инерциально стабилизированной платформы, вход в атмосферу, соответственно обозначаемые шифрами Р01—Р07, Р10—Р17, Р20—Р27, Р3О—Р37, Р40—Р47, Р50—Р57, Р60—Р67.
Для каждого этапа полета штурман выбирает необходимую спецпрограмму и вводит ее в бортовую ЭЦВМ, набирая соответствующий ей шифр на пульте управления.
Кроме спецпрограмм можно использовать различные алгоритмы и получить от бортовой ЭЦВМ полезную информацию о положении корабля в космическом пространстве, определить апогей и перигей орбиты, долготу, широту и высоту полета.
Программа Р40 вводится в бортовую ЭЦВМ за 5 мин до зажигания ЖРД двигательной установки служебного отсека во всех случаях, когда осуществляется маневр управления траекторией полета корабля Apollo. Точное направление вектора тяги ЖРД в начале маневра и метод осуществления маневра зависят от параметров цели, которые должны быть заранее известны.
Проблема целеуказания возникает в заданной точке космического пространства и в определенное время решается бортовой ЭЦВМ с помощью спецпрограммы Р34. Эта спецпрограмма вводится в бортовую ЭЦВМ раньше Р40. Спецпрограммой Р34 определяются потребное импульсное изменение скорости, перигейное расстояние, ожидаемый угол средней рамки кардана и выдаются экипажу заранее; кроме этого, подсчитываются расход топлива на маневр, конечная орбита и запас высоты в перигее конечной орбиты.
Перед выключением спецпрограммы Р34 и отсылкой ее в память бортовой ЭЦВМ до дальнейшего использования экипаж оценивает и одобряет полученные данные – время зажигания, продолжительность маневра и расчетный вектор промаха цели,—которые используются для расчета управления маневром.
Спецпрограмма Р40 вводится заранее, чтобы экипаж успел выполнить операции по «листу проверки», предшествующие каждому активному участку траектории.
Читать дальшеИнтервал:
Закладка: