Иван Шунейко - Пилотируемые полеты на Луну

- Название:Пилотируемые полеты на Луну
- Автор:
- Жанр:
- Издательство:Государственный Комитет Совета министров СССР по науке и технике
- Год:1973
- Город:Москва
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Иван Шунейко - Пилотируемые полеты на Луну краткое содержание
Выпуск Итоги науки и техники из серии Ракетостроение, том 3, «Пилотируемые полеты на Луну, конструкция и характеристики Saturn V Apollo» является обзором и систематизацией работ, информация о которых опубликована в изданиях ВИНИТИ АН СССР в 1969—1972 гг.
В томе 3 описываются конструкция, весовые, летные характеристики и космические летные испытания ракеты-носителя Saturn V и корабля Apollo. Рассматриваются системы управления корабля Apollo, принципы прицеливания траектории полета Земля-Луна-Земля, навигация, коррекция траектории полета, методы аварийного возвращения.
Описываются полеты на Луну кораблей Apollo-11, 12, 13, 14, 15, 16 и 17, анализируется механика полета, посадка на Луну, взлет с Луны и возвращение на Землю.
Библиографический обзор литературы и рефератов, опубликованных в изданиях ВИНИТИ АН СССР, приводится в конце каждой главы.
Выпуск рассчитан на научных работников, инженеров-конструкторов, специалистов по испытанию и эксплуатации, преподавателей, аспирантов, работающих в области астронавтики, космической ракетной техники и авиации. Книга предназначается и для специалистов смежных с астронавтикой наук, интересующихся космической ракетной техникой, обеспечивающей полет человека на Луну.
Пилотируемые полеты на Луну - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
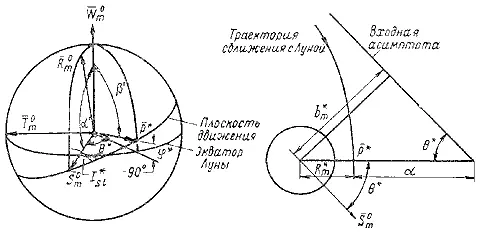
Рис. 31.7. Определение переменных для расчета параметров попадания при встрече с Луной.
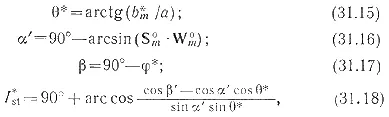
можно вычислить приблизительно требуемый угол ?* между асимптотой и радиусом-вектором перицентра. Зная асимптоту, т. е. вектор Sm* после первого приближения, а также требуемые величины ?*, Rm* и ?*, можно из геометрических соотношений представить R*m и ?* через ( В.Т0)* и ( B.R0)*. Для этого рассмотрим следующие уравнения (рис. 31.6):
где Wm0 – единичный вектор угловой скорости вращения Луны; ?*—угол между входной асимптомой гиперболы и заданным радиусом-вектором периселения; ?'—угол между Wm0 и Sm0; ?'—угол между Wш0 и заданным радиусом-вектором периселения; Ist* – угол между Tm0 и В*m .
Так как первые вычисленные значения величин ( В·Т0)* и ( B-R0)* не являются заданными, используется принцип ограничения перемещения конечной точки. Вследствие изменения входной асимптоты гиперболы изменяются также величины ?* и а . Результатом этого является медленное изменение ( В·Т0)* в процессе вычислений, однако процесс быстро сходится, так что заданные величины Rm* и ?* и получаются эффективно.
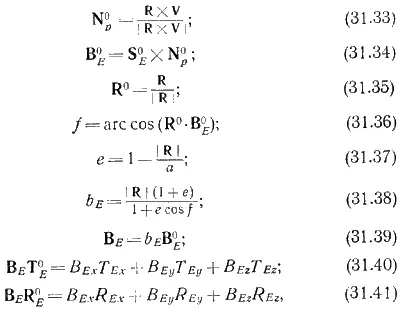
Для вычисления параметров точки попадания используются формулы
где е – эксцентриситет; b – малая полуось; ? – угол между действительным радиусом-вектором перицентра и входной асимптотой; S0m – единичный селеноцентрический вектор, параллельный входной асимптоте; Т0m – единичный вектор в плоскости лунного экватора, направленный по S0m X W0m; R0m – единичный вектор, дополняющий систему координат до правой; Р0 – единичный вектор, направленный в точку периселения;
Q0 – единичный вектор скорости в периселении; Вm вектор, направленный из центра Луны перпендикулярно входной асимптоте.
Действительные лунные параметры попадания определяются как

Земные параметры попадания
Радиус наибольшего сближения с Землей RЕ также выражается через параметры попадания, чтобы гарантировать монотонность и достаточную линейность функций относительно переменных отправления от Земли. На рис. 31.8 показаны траектория возвращения к Земле и система координат для определения параметров попадания. Вектор S0E направлен приблизительно вдоль линии Луна-Земля, соответствующей моменту отправления от луны, Т0Е расположен в плоскости земного экватора, R0E дополняет систему до правой
На рис. 31.9 показаны зависимости BЕ· Т0Е и BЕ· R0Е от продолжительности активного участка ступени S=IVB и времени старта для тех же условий отправления от Земли.
Поскольку вблизи Земли ограничен лишь параметр RE,-необходима только одна компонента параметра попадания. Вычисления показывают, что при изменении каждого из трех начальных условий величина BЕ· T0Е изменяется сильнее, чем BЕ· R0Е. При определении параметра ( BЕ· T0Е)* через RE* вычисления производятся по следующим формулам:
где bE* – заданная величина эллиптического параметра попадания; I*stE – заданный угол между В0E и T0E; В·T0E – заданный параметр попадания при возвращении к Земле.
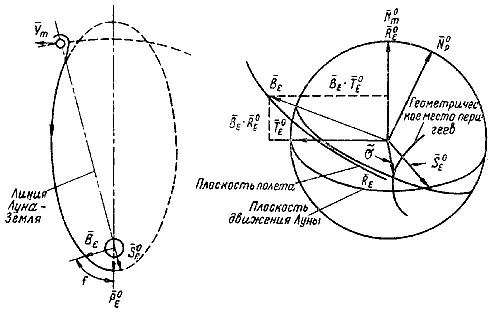
Рис. 31.8. Параметры попадания при встрече с Землей.
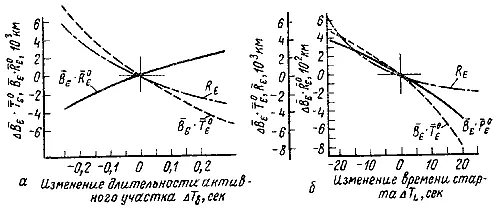
Рис. 31.9. Зависимость параметров попадания и re от изменения продолжительности активного участка и времени старта.
Вычисление действительных величин В·T0E и В·R0E в процессе каждой итерации производится следующим образом. В перигее заданы радиус-вектор относительно центра Земли R, вектор скорости Vи большая полуось геоцентрического эллипса а. Расчет проводится по формулам
где Np0 – единичный вектор, перпендикулярный плоскости геоцентрического эллипса; f – угол между R0 и ВE0; е – эксцентриситет геоцентрического эллипса; bE – модуль вектора B0E, направленного перпендикулярно S0E из центра Земли к действительной входной траектории; ВE, TE0, ВE, RE0 – действительные параметры попадания.
Методика расчета траектории возвращения
Траектории, которые подходят к Луне по направлению движения, не гарантируют получения участка возвращения к Земле, который будет отвечать требованиям сходимости процесса расчета траекторий. Чтобы обеспечить получение траектории возвращения к Земле, в схеме расчета с использованием сфер действия вводится разрыв между окололунным и околоземным участками траектории. На каждой окололунной траектории согласно рассматриваемой схеме расчета космический корабль переводится из состояния, соответствующего действительному периселению, в требуемое состояние. После этого начинается интегрирование околоземной траектории. Разрыв исчезает при достижении сходимости. Показанные на рис. 31.7 геометрические соотношения для окололунного участка позволяют определить Rm* и ?m*. Если известны вектор Sm0 и наклонение Ist*, то требуемые значения радиуса-вектора периселения Р* и вектора скорости Q* можно вычислить по следующим формулам:
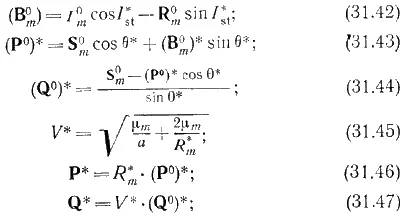
где ( Р0)* и ( Q0)* – соответствующие заданные единичные векторы, направленные по радиусам-векторам периселения и скорости в периселении, а V* – заданная величина скорости в периселении. [2,3, 10, 16,17.]
3.2. Управление траекторией полета корабля Apollo
Бортовая ЭЦВМ – главный элемент системы управления Apollo. Успех управления полетом корабля целиком зависит от эффективности работы бортовой ЭЦВМ. На любом этапе полета требуется, чтобы бортовая ЭЦВМ выполняла почти одновременно множество различных функций: ввод данных о приращении скорости, углов кардана, сигналов состояния систем, прием команд от астронавтов через пульт управления и команд с Земли и выдачу на выходе команд управления, режимов управления, цифровых сигналов, включения световых сигналов и передачу цифровой телеметрии.
Читать дальшеИнтервал:
Закладка: