Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Распознавание речи
Диапазон слышимости человеческого уха лежит в пределах от 10 до 15.000 Гц. Для регистрации звуковых колебаний могут использоваться микрофоны и усилители, причем диапазон «слышимости» микрофона, как правило, превышает возможности уха. Для робототехники использование звука является ценным инструментом.
В обычной жизни слух используется преимущественно для коммуникации (язык). Создание робототехнических систем распознавания речи сейчас очень популярно. По этой причине мы посвятим целую главу (см. гл. 7) созданию схем распознавания речи и их интерфейсов. Но, тем не менее, не пропустите следующую информацию, поскольку использование звуковых систем в роботах может оказаться очень полезным.
Звуковые и ультразвуковые системы
Звук может быть использован в играх, определении расстояний, предотвращении столкновений и объезде препятствий. Для игры в «салки» роботы снабжены двухтональным генератором и приемником. Каждый робот может генерировать и принимать сигналы двух тонов. Допустим, тон А составляет 3000 Гц, а тон В – 6000 Гц. Эти тоны издаются при любом столкновении роботов (используются контактные выключатели).
Робот, который является «салкой» (водящим), издает звук тона В при любом столкновении «бамперов» с другим роботом. Робот, который является «не водящим», в этом случае издает звук тона А. Напомним, что при столкновении «водящий» робот издает звук В. «Не водящий» робот слышит звук В, переключается и становится «водящим». В свою очередь «водящий» робот слышит звук А и становится «не водящим». При столкновении двух «неводящих» роботов каждый издает звук тона А, поэтому их состояние не меняется. Понятно, что мы использовали звуковые сигналы в качестве примера. С тем же успехом можно использовать системы коммуникации на ИК лучах.
Для определения расстояний и обнаружения препятствий часто используется ультразвук. Многие конструкторы остановились на использовании ультразвуковых модулей компании Polaroid (см. рис. 5.33). Подобные модули используются в фотокамерах Polaroid для быстрого определения расстояния до объекта и фокусировки объектива с целью получения четкого изображения. При соединении с интерфейсом микроконтроллера подобные устройства способны измерять расстояния с большой точностью.
Рис. 5.33. Ультразвуковой дальномер типа Polaroid
Такие датчики фирмы Polaroid очень удобны для использования в роботах с целью определения расстояний. Устройство способно измерять расстояния до 10 м. При использовании сервомотора или шагового двигателя устройство можно поворачивать на манер радара для составления навигационной карты или обнаружения свободного прохода.
При каждом включении УЗ преобразователь фирмы Polaroid издает слышимый щелчок. Эти постоянные щелчки, исходящие от датчика, кажутся мне раздражающими. Хотя модуль функционирует в ультразвуковом диапазоне, начальный процесс возбуждения УЗ излучателя сопровождается слышимыми звуками.
Относительно легко создать УЗ систему избегания столкновений, которая, будучи полостью ультразвуковой, работает «тихо». Основная схема повторяет схему избегания столкновений на ИК лучах, с тем отличием, что мы используем звук вместо света. На рис. 5.34 показана функциональная схема устройства. Передатчик посылает сигнал 40 кГц в УЗ преобразователь (излучатель). Другой преобразователь (приемник) расположен рядом с излучателем передатчика. Когда робот приближается к стене или препятствию, сигнал 40 кГц отражается и попадает в приемник, что вызывает повышение амплитуды его выходного напряжения. Когда напряжение превысит пороговое значение, компаратор перебросится в другое состояние, сигнализируя о наличии препятствия.
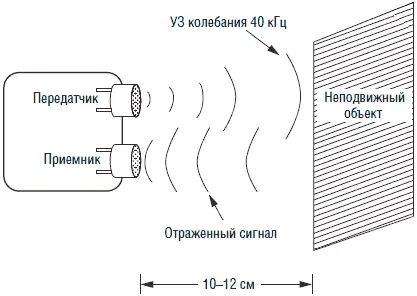
Рис. 5.34. Схема УЗ детектора препятствий
УЗ приемный блок
УЗ приемный блок (см. рис. 5.35) используется для точной настройки передатчика. Дело в том, что УЗ преобразователи имеют резонансную частоту 40 кГц. Если частота отличается от резонансной (±750 Гц), то эффективность преобразователя резко падает. Точная настройка преобразователя на максимум резонанса не составляет трудности, если вы воспользуетесь процедурой, описанной ниже. Для этого потребуется авометр, измеряющий постоянный ток, со шкалой 2 В.
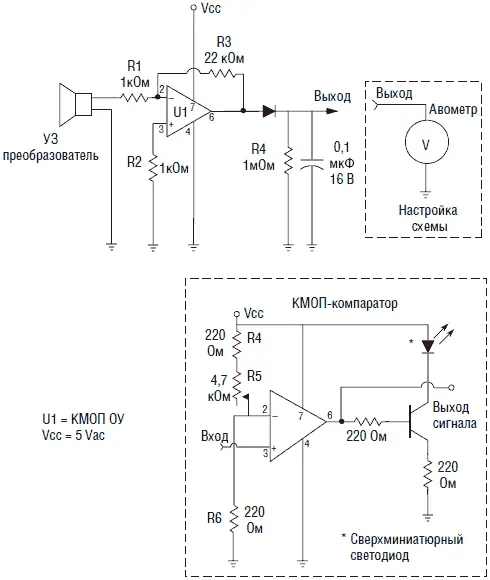
Рис. 5.35. Схема УЗ приемника
Поскольку преобразователи имеют очень узкую полосу пропускания, (резонанс лежит около частоты 40 кГц), использование петли ФАПЧ (ИС LM567) не является необходимым. Сам преобразователь подавляет сигналы вне его частотного диапазона.
В приемном блоке использован ОУ КМОП-структуры. Цоколевка корпуса усилителя с 8 выводами аналогична универсальной ИС типа 741 (но не является заменой ОУ 741). ОУ включен в схему с инвертированным входом и имеет коэффициент усиления порядка 22.
УЗ передающий блок
УЗ передающий блок выполнен на ИС КМОП-структуры типа 555, включенной в режиме генерации. Для точной подстройки частоты использован подстроечный резистор R2 4,7 кОм (см. рис. 5.36).
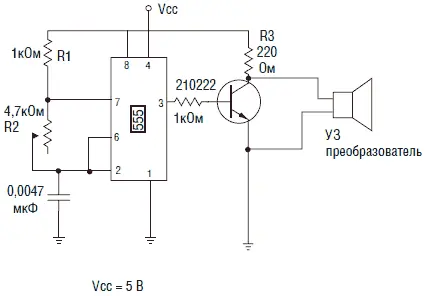
Рис. 5.36. Схема УЗ передатчика
Расположите УЗ преобразователи (излучатели) навстречу друг другу на расстоянии 10–15 см (см. рис. 5.37). Присоедините вольтметр, как показано на вставке к рис. 5.35 (компаратор при этом нужно отсоединить). Установите авометр на измерение напряжения постоянного тока. Выходное напряжение будет порядка 2 В, соответственно необходимо установить нужный предел измерения. Включите одновременно оба устройства. Подстраивая передатчик с помощью R2, добейтесь максимума выходного напряжения на вольтметре, которое должно составлять порядка 2 В.
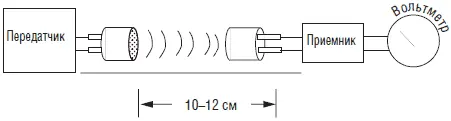
Рис. 5.37. Проверка работы УЗ устройства
После настройки передатчика мы должны настроить схему компаратора. Отсоедините вольтметр и присоедините компаратор. Расположите УЗ преобразователи в ряд, в одном и том же направлении на расстоянии примерно 15 мм друг от друга. Расположите предмет с плоской гранью на расстоянии примерно 75 мм перед УЗ преобразователями. Включите приемник и передатчик и подстраивайте резистор R5 приемника до зажигания сверхминиатюрного светодиода.
Читать дальшеИнтервал:
Закладка:








