Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:

Рис. 5.44. Датчик давления Flexiforce
Датчики запаха
Диапазон реакций на запахи человеческого носа в настоящее время недостижим ни одной из известных искусственных сенсорных систем. Известны простые газовые датчики, способные обнаружить присутствие токсичных газов (см. рис. 5.45). Подобные датчики могут быть использованы для создания автоматических (роботизованных) систем вентиляции.
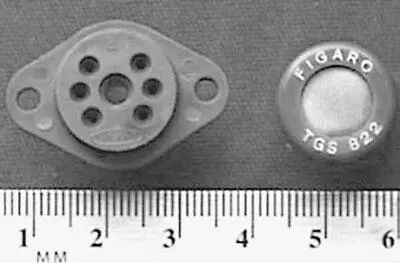
Рис. 5.45. Датчики ядовитых газов
Пример включения простого газового датчика представлен на рис. 5.46. Для создания чувствительности резистивный элемент должен быть подвергнут нагреву. Устройство снабжено встроенным подогревателем, питающимся от отдельного источника. Подогреватель потребляет около 130 мА при стабилизированном напряжении питания 5 В. Показания резистивного элемента могут быть считаны аналогично описанному выше.
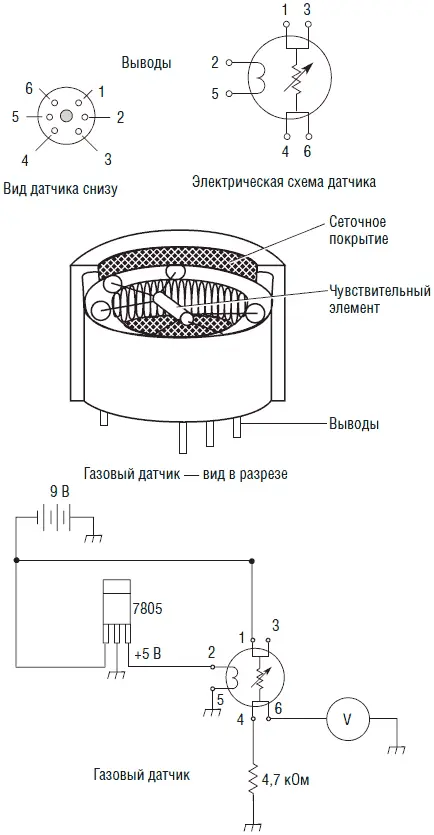
Рис. 5.46. Проверка работы датчиков токсичных газов
При использовании простых схем возможности газовых датчиков раскрываются не полностью. Дело в том, что одиночный датчик не выдает достаточно точных показаний. Иными словами, показания датчиков немного изменяются от экземпляра к экземпляру. Это «аналоговое» свойство группы датчиков может быть использовано для создания более чувствительного устройства.
Рассмотрим группу из восьми датчиков, резистивный элемент каждого из которых подключен к АЦП. В данной ситуации использование компаратора неэффективно, поскольку нас как раз интересует небольшая разница в показаниях отдельных датчиков. Для калибровки устройства необходимо выпустить небольшую порцию известного газа (запаха) на все восемь датчиков. Показания каждого из них преобразуются АЦП и записываются в компьютер. Разница показаний датчиков формирует профиль для каждого анализируемого запаха.
Подбор профиля хорошо реализуется в технологии нейронных сетей. Нейронная сеть может быть создана таким образом, что окажется в состоянии определять не только интенсивность, но и распознавать различные запахи.
Датчики влажности
Пассивные датчики влажности с резистивным выходом представляют собой относительно новую разработку и доступны к приобретению.
Проверка датчиков
При разработке и изготовлении систем чувствительных датчиков представляется разумным производить их тестирование перед установкой в систему робота. Одним из способов, который я осуществил, являлось создание небольшого передвижного робота, единственной функцией которого была проверка работоспособности и характеристик датчиков. Таким образом, оказалось возможным оценить время срабатывания датчика и его надежность до установки в более сложную конструкцию робота.
Робот способен тестировать «ударные» выключатели, световые выключатели, датчики изгиба, а также системы датчиков предотвращения столкновений, использующих ультразвук и ИК лучи. Прочие типы датчиков могут потребовать тестовой платформы больших размеров.
Изготовление робота-тестера
Я назвал конструкцию этого небольшого устройства роботом-тестером. В основе ее лежит небольшой электрический автомобиль, который можно приобрести менее чем за $10 (см. рис. 5.47).

Рис. 5.47. Тестер
Принципиальная схема робота-тестера изображена на рис. 5.48. Сенсор подключается к входу запуска таймера ИС типа 555, использованной в режиме одновибратора. На выходе схемы (вывод 3) присутствует напряжение низкого уровня до момента подачи отрицательного запускающего импульса на вывод 2. После этого на выводе 3 генерируется одиночный положительный импульс длительностью порядка 1 с.
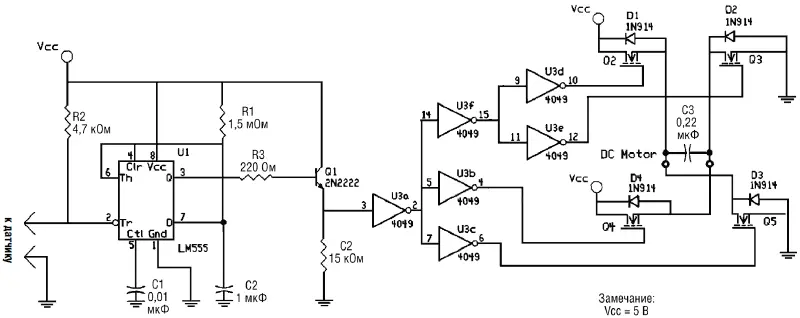
Рис. 5.48. Схема работы тестера
Вывод 3 ИС 555 соединен с NPN транзистором типа 2N2222. Выходной сигнал снимается с эмиттера транзистора и поступает на одну из 6 схем «НЕ» инвертора, выполненного на ИС 4049. Выходы буферов схем «НЕ» 4049 поступают на МОП полевые транзисторы, включенные по схеме моста, которые управляют вращением двигателя привода.
При наличии низкого уровня на выходе ИС 555 транзисторы моста включают двигатель для движения «вперед». Тестируемый датчик подключен к входу запуска 2 ИС 555. Датчик включен таким образом, что при замыкании или коммутировании он выдает отрицательный импульс (садится на землю). Этот импульс на выводе 2 запускает одновибратор, который в свою очередь выдает положительный импульс длительностью 1 с на вывод 3. Данным импульсом транзисторы перекоммутируют двигатель на 1 с для движения «назад».
Подобный тестер может быть использован для проверки большинства датчиков и преобразователей.
Усовершенствование робота-тестера
Когда я разрабатывал конструкцию робота-тестера, то предполагал что большинство проверяемых датчиков будет использовано в конструкциях миниатюрных моделей. Однако вышло по-другому. В процессе конструирования различных схем-прототипов, как правило, не хватало времени для изготовления печатной платы, не говоря уже о минимизации размеров устройства.
Если бы я создал другого робота-тестера, я бы, несомненно, использовал большую модель электрического автомобиля в качестве платформы. Наличие достаточного места позволило бы с большим удобством проверять различные типы датчиков и иных схем.
Детали для описанных устройств можно заказать по адресу:
Images Company
P.O.Box 140742
Staten Island, NY 10314
(718)698-8305
http://www.imagesco.com
Глава 6
Интеллект
«Интеллект», заключенный в роботе, принимает одну из двух форм: программно поддерживаемый интеллект (экспертная система) и интеллект в форме нейронной сети. Возможно одновременное функционирование этих форм интеллекта. Такой синтез со временем будет широко использоваться в роботах для создания систем развитого ИИ.
Экспертные программы ИИ, основанные на системе решающих правил, хорошо известны большинству пользователей ПК. Это программы, написанные на языке высокого или низкого уровня типа С++, Basic или ассемблере. С другой стороны, нейронные системы используют искусственные, электронные нейроны для управления и генерации поведения робота. Подобная архитектура построения нейронных сетей, управляющих поведением роботов, была впервые предложена Вильямом Грей Вальтером в конце 40-х начале 50-х годов. Позднее Родни Брукс из Массачусетского технологического института разработал поведенчески ориентированную структуру сетей роботов под названием предикативной (условной) архитектуры. Мы рассмотрим работу поведенчески ориентированных роботов в гл. 8.
Читать дальшеИнтервал:
Закладка:








