Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Прежде чем мы сможем попытаться моделировать человеческое зрение, нам потребуется создать систему стереоскопически размещаемых камер (в дополнение к системе распознавания образов, что само по себе является непростой задачей). Некоторые исследования подобного рода проводятся в Массачусетсом технологическом институте, там создан робот-гуманоид COG. С помощью двух стереоскопических камер можно получить два изображения, которые обрабатываются и затем сравниваются для получения трехмерной картины. Этот процесс аналогичен получению трехмерных изображений у человека. Для определения глубины пространства каждая камера должна быть смонтирована на подвижном карданном подвесе, что позволит камерам сводить оптические оси (конвергировать) и фокусироваться на объекте. Для определения расстояния до объекта используется значение величины конвергенции.
Проблемы машинного зрения представляют благодатную почву для развития. В настоящее время большинство подобных систем требует мощных компьютеров и решает задачи обработки изображений.
Ощущение тела
Ощущение тела включает чувство его положения относительно опорных точек и в пространстве. Простейшее «чувство тела» можно смоделировать в роботе при помощи многочисленных датчиков наклона (см. рис. 5.28). По меньшей мере, робот сможет «понять», имеет ли он наклон вперед или назад, находится на «животе» или на «спине», вверх ногами или на правом боку. На основе полученной информации о положении тела робот может совершить некоторые действия и изменить свое положение.
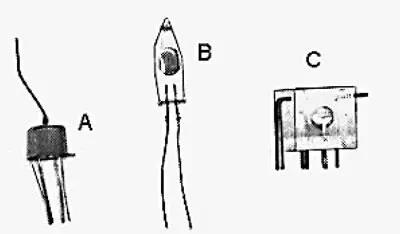
Рис. 5.28. Датчики наклона
Индикатор направления – магнитной поле
Информацию о направлении можно полунить с помощью электронного компаса, использующего магнитное поле Земли. Это позволит роботу двигаться в заданном направлении или получать информацию о направлении перемещения.
Наиболее простым устройством является цифровой компас модели 1490 (рис. 5.29). Компас представляет собой твердотельный датчик Холла. Устройство снабжено четырьмя выводами, соответствующими положению четырех основных сторон света: север, восток, юг и запад. При использовании небольшого логического устройства можно определить восемь направлений.
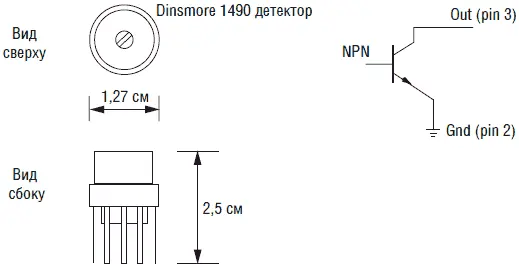
Рис. 5.29. Цифровой компас 1490
Компас демпфирован таким образом, что его характеристики близки характеристикам компаса с жидкостным наполнением. Для поворота на угол 90° компасу требуется порядка 2,5 с. Демпфирование предотвращает крутильные колебания устройства и эффект дрожания вблизи указываемого направления. Устройство чувствительно к углу наклона. При угле наклона более 12° погрешности измерения превышают допустимые.
На нижней части устройства расположены двенадцать выводов, объединенных в четыре группы по три вывода. Если смотреть на компас сверху, то его выводы в группе обозначены 1, 2 и 3. Вывод 1 соединен с источником питания (5 В), вывод 2 соединен с землей. Выводы 3 каждой группы являются информационными выходами. Данные выходы аналогичны схеме NPN транзистора, включенного с общим коллектором. В таком включении выход не производит напряжение, но может пропускать значительный ток (до 20 мА), который достаточен для зажигания светодиода.
Тестовая схема изображена на рис. 5.30. Датчик сохраняет работоспособность в диапазоне питающего напряжения от 5 до 18 В. В данном случае используется батарея напряжением 9 В и регулятор напряжения на 5 В, выполненный на ИС 7805.
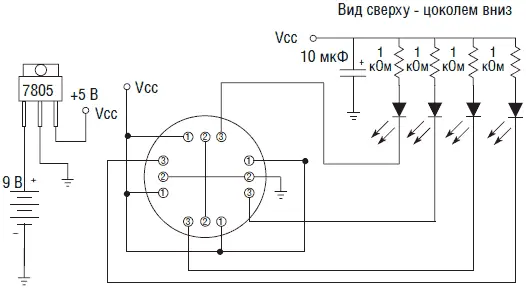
Рис. 5.30. Тестовая схема цифрового компаса с 4 светодиодами
Возьмите за правило: с целью безопасного сопряжения схем с компьютерными устройствами, не устанавливайте рабочих напряжений выше 5 В. Например, если мы сопрягаем электронный компас с интерфейсом PIC микроконтроллера и будем использовать напряжение питания 9 В, то слишком большое напряжение на выходе компаса может пережечь входные цепи микроконтроллера.
Для указания направления в тестовой схеме использованы светодиоды. По мере поворота устройства, каждое из основных направлений (сторон света) индицируется одним светодиодом. Промежуточные направления вызывают зажигание двух светодиодов.
Проверка и калибровка
При помощи обычного компаса найдите направление на север. Поворачивайте устройство до тех пор, пока не загорится один светодиод. Для удобства я использую момент зажигания светодиода, наиболее удаленного от датчика. Если вы сделаете то же самое, то автоматически получите последовательность, отображенную на рис. 5.31.
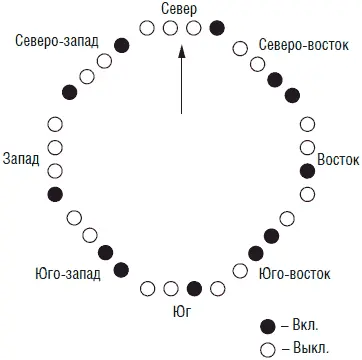
Рис. 5.31. Последовательность включения светодиодов
Компьютерный интерфейс
Четыре линии выхода компаса формируют 4-разрядное двоичное число (полубайт), которое можно легко считать с помощью микроконтроллера, компьютера или иной схемы (см. табл. 5.4). До момента рассмотрения схемы работы PIC микроконтроллера 16F84 в гл. 7 мы не будем рассматривать схемы его подключения.

Электронный аналоговый компас типа 1525
В большинстве случаев информации о направлении, выдаваемой устройством 1490, более чем достаточно для правильной работы робота. Однако в каких-то случаях требуется более точное определение направления, и в этом случае можно воспользоваться аналоговым электронным компасом типа 1525 (см. рис. 5.32).
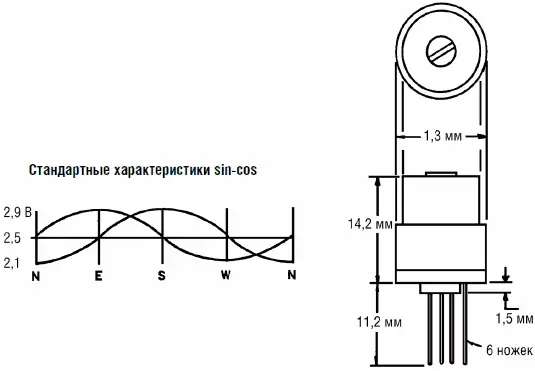
Рис. 5.32. Электронный аналоговый компас типа 1525
Выходная информация устройства 1525 требует гораздо более сложной обработки, но преимущество такого электронного компаса в том, что он определяет направление с точностью порядка 1°.
Выходной сигнал представляет собой два синусоидальных колебания, сдвинутых по фазе на 90° одно относительно другого (см. положение фаз колебаний на рис. 5.32). Амплитуда каждого колебания зависит от направления устройства. Если амплитуда четверти колебания (фаза 90°) преобразуется 8-битным АЦП, то разрешение устройства будет порядка 1°.
Система глобального позиционирования (GPS)
Использование системы глобального позиционирования (GPS) позволит роботу определить свое местонахождение с большой точностью в любом месте Земли. Использование GPS в большинстве случаев не является действительно необходимым, но снижение стоимости подобных систем делает их возможное применение вполне реальным.
Читать дальшеИнтервал:
Закладка:








