Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Вес вытесненного воздуха = 0,14 (1,29) = 0,18 кг
Вес 0,14 куб.м. гелия = 0,14 (0,178) = 0,025 кг
Подъемная сила = 0,18 кг – 0,025 кг = 0,155 кг
Подъемная сила достаточно велика! Это произошло потому, что мы не вычли вес самого шара. Допустим, шар весит 0,1 кг, тогда полезная подъемная сила (0,155 кг-0,1 кг) уменьшится до 0,055 кг, или 55 г.
Вес 0,14 куб.м. водорода = 0,14 (0,09) = 0,012 кг
Подъемная сила = 0,18 кг – 0,012 кг = 0,168 кг
Разница подъемной силы для шара объемом 0,14 куб.м. составит:
0,168 кг – 0,155 кг = 0,013 кг, или 13 г.
Разница подъемной силы оказалась очень невелика, поэтому не стоит подвергаться риску, применяя водород. Я бы советовал использовать исключительно гелий.
Размеры дирижабля
Размер куска материала Mylar, который используется для изготовления дирижабля, после сгибания пополам составляет в плоском виде 860х 1422 мм. Вес материала составляет 93 г. Достаточно сложно определить количество гелия, заполняющего дирижабль. Для грубой оценки я буду считать, что дирижабль будет иметь форму цилиндра. Я знаю, что подушка не имеет цилиндрической формы, но, как я уже сказал, это грубая оценка. Сперва найдем диаметр. Кусок материала имеет длину 860х 2, т. е. длина окружности составит 1720 мм. Длина окружности равна радиусу, умноженному на 2п. Вычисляем радиус, который оказывается равным 280 мм. Объем цилиндра равен квадрату радиуса, умноженному на п и на высоту цилиндра. Высота в данном случае равна 1422 мм. Отсюда объем цилиндра будет равен 0,32 куб.м.
Дирижабль не будет заполнен газом до полного объема. В этом случае я буду считать, что заполнение составит 70 % расчетной величины, или около 0,22 куб.м. гелия.
Вес вытесненного воздуха = 0,22 (1,29) = 0,29 кг
Вес гелия = 0,22 (0,178) = 0,04 кг
Вес оболочки из материала Mylar = 0,09 кг
Полезная подъемная сила = + 0,29 – 0,04 – 0,09 = 0,16 кг, или 160 г.
Конструкция дирижабля
Конструкция дирижабля проста и не требует особых замечаний. Основной проблемой является надежность сварного шва. Для практики отрежьте от листа материала Mylar небольшую полоску. Согните полоску Mylar блестящей стороной наружу, а темной стороной внутрь. Поставьте регулятор утюга в среднее положение. Регулируя температуру утюга, проглаживайте материал до получения соединения нужного качества. После того как вы изменили температуру утюга, подождите пять минут для стабилизации нагрева. Если температура окажется слишком большой, то материал «потечет» и в нем появятся отверстия. Если температура слишком мала, то сваренные части можно слишком легко разъединить. При правильной температуре сварки для разъединения шва потребуются значительные усилия. Перед тем как пробовать прочность шва, охладите материал Mylar в течение минуты. Найдя правильную установку температуры, запомните ее для использования в дальнейшем.
Мы будем изготавливать дирижабль в форме подушки. Согните лист материала Mylar пополам блестящей стороной наружу. Сварите три открытых стороны, оставив небольшое отверстие для штуцера, заполняющего дирижабль газом, и все готово. Ширина шва должна быть в пределах от 12 до 25 мм.
Видеокамера ПЗС
Видеокамера с ПЗС матрицей обеспечивает передачу изображения с дирижабля (см. рис. 14.3). Естественно, вес принимается во внимание в первую очередь. Камера весит чуть больше 15 г. Размеры камеры составляют 31x31x3 мм. Светочувствительность камеры составляет 0,03 люкс, разрешение 430 телевизионных строк. Выходной сигнал 1 В в системе NTSC. Камера питается от источника постоянного напряжения 9-12 В. Ток, потребляемый камерой, составляет примерно 100 мА.

Рис. 14.3. Легкая ПЗС видеокамера для системы телеслежения
Камеру можно питать от батареи «Крона» напряжением 9 В. Вес батареи (45 г.) в три раза больше веса самой камеры.
Телевизионный передатчик
Существует несколько типов наборов оборудования ТВ передатчика, которые выделяются в два основных класса. Передатчики первого типа транслируют видео– и звуковой сигналы на частоте одного из стандартных телевизионных каналов. Телевизионный приемник принимает сигнал и отображает его на экране. Радиус действия подобной системы составляет порядка 100 метров.
Другой тип передатчиков значительно дороже. Они транслируют сигналы выше частот телевизионного диапазона (частота составляет около 900 МГц), поэтому для просмотра на экране телевизора требуется специальный конвертер. Конвертер принимает сигнал на частоте 900 МГц и понижает ее до частоты стандартного телевизионного диапазона. Такая система отличается большим радиусом действия и лучшим качеством изображения. Блок, использованный в первоначальной версии устройства, передает сигналы непосредственно на телевизионный приемник в диапазоне УКВ (канал 14) (см. рис. 14.4).
Рис. 14.4. Плата ТВ передатчика
Система радиоуправления
Система радиоуправления специально создана для подобных дирижаблей (см. рис. 14.5). Она имеет исключительно малый вес. Блок движителя представляет собой сдвоенный турбовентилятор, закрепленный к нижней части дирижабля. Каждый вентилятор может вращаться в обоих направлениях и управляется отдельно по двухканальному радиопередатчику.

Рис. 14.5. Легкая система радиоуправления для дирижабля
Такая конструкция позволяет повысить маневренность дирижабля. Когда один вентилятор толкает дирижабль вперед, а другой – назад, то это позволяет быстро развернуть всю конструкцию. Дирижабль-подушка, готовый к процессу телеслежения, представлен на рис. 14.6. Детальный вид турбовентилятора, миниатюрной ПЗС видеокамеры и телевизионного передатчика показан на рис. 14.7.
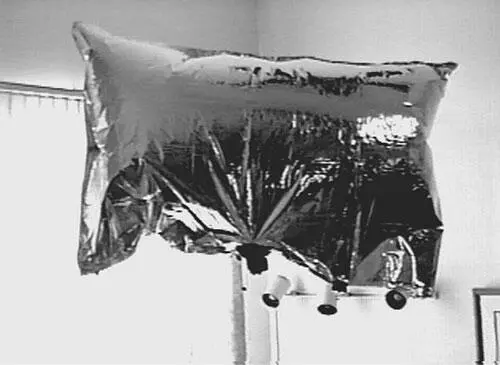
Рис. 14.6. Дирижабль-подушка

Рис. 14.7. Детальный вид турбовентилятора, ПЗС видеокамеры и передатчика
Дирижабль как он есть представляет собой систему телеслежения. Если снабдить его автономной навигационной системой, то мы превратим дирижабль в летающего робота.
Список деталей дирижабля
• (1) дирижабль с радиоуправлением, #T30824-77
Деталь можно заказать в:
Edmund Scientific
Читать дальшеИнтервал:
Закладка:








