Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Рука изготовлена из легкого пластика. Большинство деталей, несущих основную нагрузку, также выполнены из пластика. Двигатели постоянного тока, использованные в конструкции руки, представляют собой миниатюрные высокооборотные двигатели с низким крутящим моментом. Для увеличения крутящего момента каждый мотор соединен с редуктором. Двигатели вместе с редукторами установлены внутри конструкции руки-манипулятора. Хотя редуктор увеличивает крутящий момент, рука робота не может поднять или нести достаточно тяжелые предметы. Рекомендуемый максимально допустимый вес при поднятии составляет 130 г.
Набор для изготовления руки робота и его компоненты представлены на рисунках 15.2 и 15.3.
Рис. 15.2. Набор для изготовления руки-робота
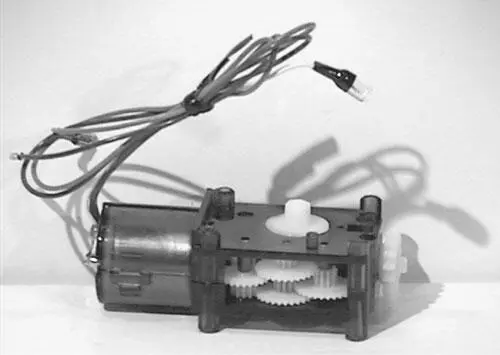
Рис. 15.3. Редуктор перед сборкой
Принцип управления двигателями
Для того чтобы понять принцип работы управления по проводам, посмотрим, как цифровой сигнал управляет работой отдельного двигателя постоянного тока. Для управления двигателем требуются два комплементарных транзистора. Один транзистор имеет проводимость PNP типа, другой – соответственно проводимость NPN типа. Каждый транзистор работает как электронный ключ, управляя движением тока, протекающего через двигатель постоянного тока. Направления движения тока, управляемые каждым из транзисторов, противоположны. Направление тока определяет направление вращения двигателя соответственно по часовой стрелке или против часовой стрелки. На рис. 15.4 приведена тестовая схема, которую вы можете собрать перед изготовлением интерфейса. Обратите внимание, что когда оба транзистора заперты, то двигатель выключен. В каждый момент времени должен быть включен только один транзистор. Если в какой-то момент оба транзистора случайно окажутся открытыми, то это приведет к короткому замыканию. Каждый двигатель управляется двумя транзисторами интерфейса, работающими аналогичным образом.
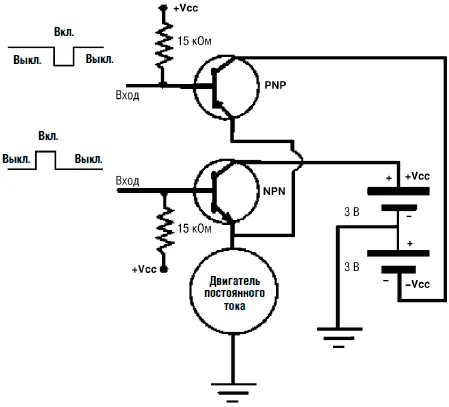
Рис. 15.4. Схема устройства проверки
Конструкция интерфейса для PC
Схема PC интерфейса приведена на рис. 15.5. В набор деталей PC интерфейса входит печатная плата, расположение деталей на которой показано на рис. 15.6.
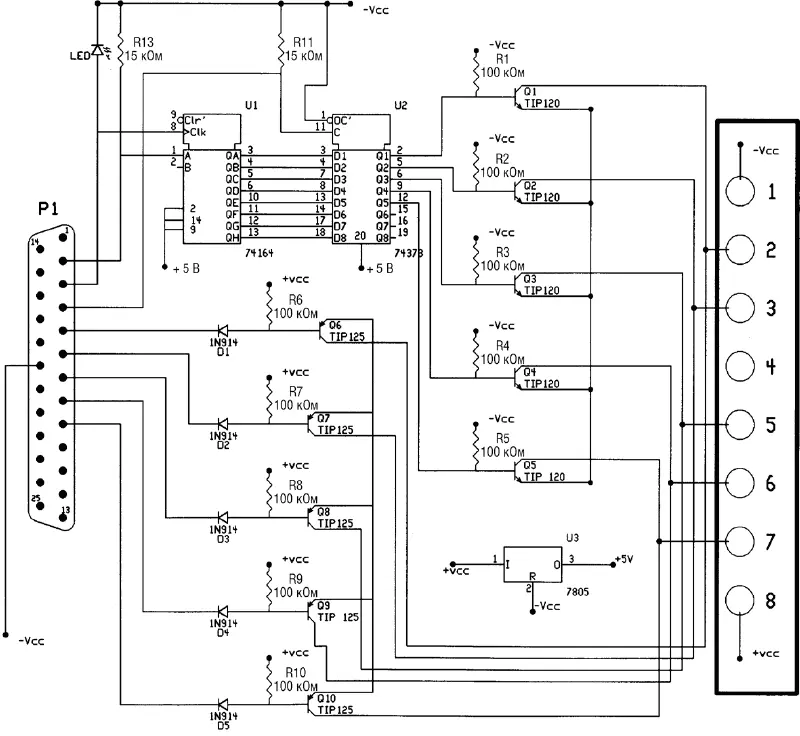
Рис. 15.5. Принципиальная схема интерфейса РС
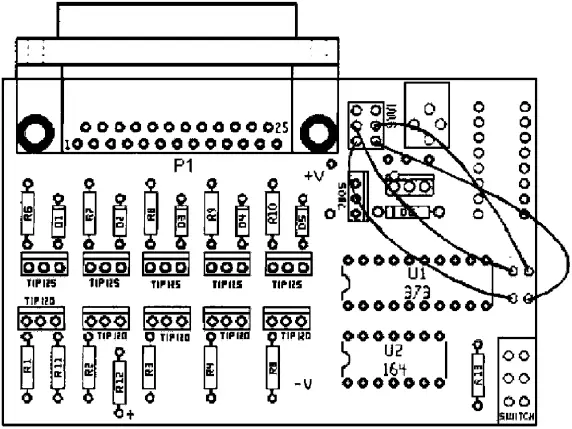
Рис. 15.6. Схема расположения деталей РС интерфейса
Прежде всего нужно определить сторону монтажа печатной платы. На стороне монтажа прочерчены белые линии, обозначающие резисторы, транзисторы, диоды, ИС и разъем DB25. Все детали вставляются в плату с монтажной стороны.
Общее указание: после пайки детали к проводникам печатной платы необходимо удалить излишне длинные выводы со стороны печати. Очень удобно следовать определенной последовательности при монтаже деталей. Сперва смонтируйте резисторы 100 кОм (цветная маркировка колец: коричневое, черное, желтое, золотое или серебряное), которые обозначены R1-R10. Затем смонтируйте 5 диодов D1-D5, убедившись, что черная полоска на диодах находится напротив разъема DB25, как это показано белыми линиями, нанесенными на монтажную сторону печатной платы. Затем смонтируйте резисторы 15 кОм (цветная маркировка, коричневый, зеленый, оранжевый, золотой или серебряный), обозначенные R11 и R13. В позиции R12 припаяйте к плате красный светодиод. Анод светодиода соответствует отверстию под R12, обозначенному знаком +. Затем смонтируйте 14– и 20-контактные панельки под ИС U1 и U2. Смонтируйте и впаяйте разъем DB25 уголкового типа. Не пытайтесь вставлять ножки разъема в плату с излишним усилием, здесь требуется исключительно точность. При необходимости осторожно покачайте разъем, стараясь не погнуть ножки выводов. Закрепите движковый переключатель и регулятор напряжения типа 7805. Отрежьте четыре куска провода необходимой длины и припаяйте к верхней части переключателя. Придерживайтесь расположения проводов, как показано на рисунке. Вставьте и впаяйте транзисторы TIP 120 и TIP 125. Наконец, впаяйте восьмиконтактный цокольный разъем и соединительный 75 миллиметровый кабель. Цоколь монтируется так, что наиболее длинные выводы смотрят вверх. Вставьте две ИС – 74LS373 и 74LS164 – в соответствующие панельки. Убедитесь, что положение ключа ИС на ее крышке совпадает с ключом, помеченным белыми линиями на печатной плате. Вы могли заметить, что на плате остались места под дополнительные детали. Это место предназначено для сетевого адаптера. На рис. 15.7 показана фотография готового интерфейса со стороны монтажа.
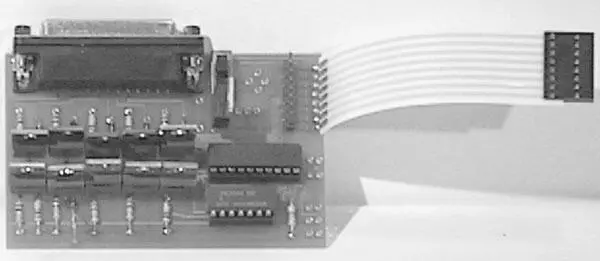
Рис. 15.7. РС интерфейс в сборе. Вид сверху
Принцип работы интерфейса
Рука-манипулятор имеет пять двигателей постоянного тока. Соответственно нам потребуются 10 шин входа/выхода для управления каждым двигателем, включая направление вращения. Параллельный (принтерный) порт IBM PC и совместимых машин содержит только восемь шин ввода/вывода. Для увеличения числа шин управления в интерфейсе руки робота используется ИС 74LS164, которая является преобразователем последовательного кода в параллельный (SIPO). При использовании всего двух шин параллельного порта D0 и D1, по которым посылается последовательный код в ИС, мы можем получить восемь дополнительных шин ввода/вывода. Как уже говорилось, можно создать восемь шин ввода/вывода, но в данном интерфейсе используются пять из них.
Когда последовательный код поступает на вход ИС 74LS164, на выходе ИС появляется соответствующий параллельный код. Если бы выходы ИС 74LS164 были непосредственно подключены к входам управляющих транзисторов, то отдельные функции руки-манипулятора включались и выключались бы в такт посылке последовательного кода. Очевидно, что такая ситуация является недопустимой. Чтобы избежать этого, в схему интерфейса введена вторая ИС 74LS373 – управляемый восьмиканальный электронный ключ.
ИС 74LS373 восьмиканальный ключ имеет восемь входных и восемь выходных шин. Двоичная информация, присутствующая на входных шинах передается на соответствующие выходы ИС только в том случае, если на ИС подан разрешающий сигнал. После выключения разрешающего сигнала текущее состояние выходных шин сохраняется (запоминается). В этом состоянии сигналы на входе ИС не оказывают никакого действия на состояние выходных шин.
Читать дальшеИнтервал:
Закладка:








