Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
После передачи последовательного пакета информации в ИС 74LS164 с вывода D2 параллельного порта подается разрешающий сигнал на ИС 74LS373. Это позволяет передать информацию уже в параллельном коде с входа ИС 74LS174 на ее выходные шины. Состоянием выходных шин управляются соответственно транзисторы TIP 120, которые, в свою очередь, управляют функциями руки-манипулятора. Процесс повторяется при подаче каждой новой команды на руку-манипулятор. Шины параллельного порта D3-D7 управляют непосредственно транзисторами TIP 125.
Подключение интерфейса к руке-манипулятору
Питание роботизованной руки-манипулятора осуществляется от источника питания 6 В, состоящего из четырех D-элементов, расположенных в основании конструкции. Интерфейс PC питается также от этого источника 6 В. Источник питания является биполярным и выдает напряжения ±3 В. Питание на интерфейс подается через восьмиконтактный разъем Molex, присоединенный к основанию манипулятора.
Присоедините интерфейс к руке-манипулятору при помощи восьмижильного кабеля Molex длиной 75 мм. Кабель Molex присоединяется к разъему, расположенному в основании манипулятора (см. рис. 15.8). Проверьте правильность и надежность вставки разъема. Для соединения платы интерфейса с компьютером используется кабель типа DB25 длиной 180 см, имеющийся в наборе. Один конец кабеля присоединяется к порту принтера. Другой конец соединяется с разъемом DB25 на плате интерфейса.
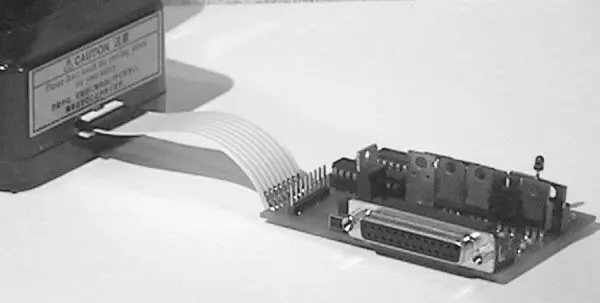
Рис. 15.8. Соединение РС интерфейса с рукой-роботом
В большинстве случаев к порту принтера штатно подключен принтер. Чтобы не заниматься присоединением и отключением разъемов каждый раз, когда вы хотите использовать манипулятор, полезно приобрести двухпозиционный блок переключателя шин принтеров A/B (DB25). Присоедините разъем интерфейса манипулятора к входу А, а принтер – к входу В. Теперь вы можете использовать переключатель для соединения компьютера либо с принтером, либо с интерфейсом.
Установка программы под Windows 95
Вставьте дискету 3,5" с меткой «Disc 1» в дисковод для флоппи-дисков и запустите программу установки (setup.exe). Программа установки создаст директорию с именем «Images» на жестком диске и скопирует необходимые файлы в эту директорию. В Start меню появится иконка Images. Для запуска программы щелкните по иконке Images в стартовом меню.
Работа с программой под Windows 95
Соедините интерфейс с портом принтера компьютера при помощи кабеля DB 25 длиной 180 см. Соедините интерфейс с основанием руки-манипулятора. До определенного времени держите интерфейс в выключенном состоянии. Если в это время включить интерфейс, то сохранившаяся в порту принтера информация может вызвать движения руки-манипулятора.
Щелкнув два раза по иконке Images в стартовом меню, запустите программу. Окно программы показано на рис. 15.9. При работе программы красный светодиод на плате интерфейса должен мигать. Примечание: чтобы светодиод начал мигать, включение питания интерфейса не требуется. Скорость мигания светодиода определяется скоростью работы процессора вашего компьютера. Мерцание светодиода может оказаться очень тусклым; для того чтобы это заметить, вам, возможно, придется уменьшить освещенность в комнате и сложить ладони «колечком» для наблюдения за светодиодом. Если светодиод не мигает, то, возможно, программа обращается по ошибочному адресу порта (порт LPT). Для переключения интерфейса на другой адрес порта (LPT порт), зайдите в окно меню установки адреса порта принтера (Printer Port Options box), расположенного в правом верхнем углу экрана. Выберите другую опцию. Правильная установка адреса порта вызовет мигание светодиода.
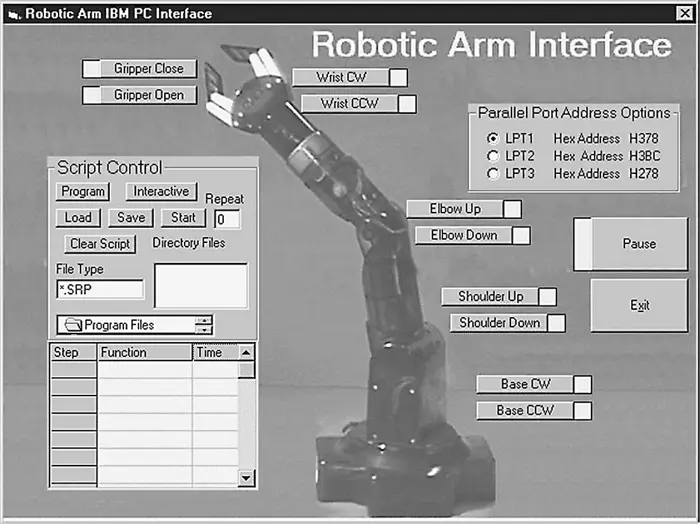
Рис. 15.9. Скриншот программы РС интерфейса под Windows
Когда светодиод будет мигать, щелкните по иконке Puuse и только после этого включите интерфейс. Щелчок соответствующей функциональной клавиши вызовет ответное движение руки-манипулятора. Повторный Щелчок приведет к остановке движения. Использование функциональных клавиш для управления рукой называется интерактивной модой управления.
Создание script-файла
Для программирования движений и автоматизированных последовательностей действий руки-манипулятора используются script-файлы. Script-файл содержит список временных команд, управляющих движениями руки-манипулятора. Создать script-файл очень просто. Для создания файла кликните по функциональной клавише program. Эта операция позволит войти в моду «программирования» script-файла. Нажимая на функциональные клавиши, мы будем управлять движениями руки, как мы уже делали, но при этом информация команд будет записываться в желтую script-таблицу, расположенную в нижнем левом углу экрана. Номер шага, начиная с единицы, будет указан в левой колонке, а для каждой новой команды он будет увеличиваться на единицу. Тип движения (функции) указан в средней колонке. После повторного щелчка функциональной клавиши выполнение движения прекращается, а в третьей колонке появляется значение времени выполнения движения от его начала до окончания. Время выполнения движения указывается с точностью до четверти секунды. Продолжая таким же образом, пользователь может запрограммировать в script-файл до 99 движений, включая паузы во времени. Затем script-файл можно сохранить, а в дальнейшем загрузить из любой директории. Выполнение команд script-файла можно циклически повторить до 99 раз, для чего необходимо ввести количество повторов в окно Repeat и нажать Start. Для окончания записи в script-файл нажмите клавишу Interactive. Эта команда переведет компьютер обратно в интерактивный режим.
«Оживление» предметов
Script-файлы могут быть использованы для компьютерной автоматизации действий или для «оживления» предметов. В случае «оживления» предметов управляемый роботизованный механический «скелет» обычно покрыт внешней оболочкой и сам не виден. Помните куклу-перчатку, описанную в начале главы? Внешняя оболочка может иметь вид человека (частично или полностью), пришельца, животного, растения, камня и чего-либо еще.
Ограничения области применения
Если вы хотите достичь профессионального уровня выполнения автоматизированных действий или «оживления» предметов, то, так сказать, для поддержания марки, точность позиционирования при выполнении движений в каждый момент времени должна приближаться к 100 %.
Однако вы можете заметить, что по мере повторения последовательности действий, записанных в script-файле, положение руки-манипулятора (паттерн-движения) будет отличаться от первоначального. Это происходит по нескольким причинам. По мере разряда батарей источника питания руки-манипулятора уменьшение мощности, подводимой к двигателям постоянного тока, приводит к снижению крутящего момента и скорости вращения двигателей. Таким образом, длина перемещения манипулятора и высота поднятого груза за один и тот же промежуток времени будет различаться для севших и «свежих» батарей. Но причина не только в этом. Даже при стабилизированном источнике питания частота вращения вала двигателя будет меняться, поскольку отсутствует регулятор частоты вращения двигателя. Для каждого фиксированного отрезка времени количество оборотов каждый раз будет немного отличаться. Это приведет к тому, что каждый раз будет различаться и положение руки-манипулятора. В довершение ко всему, в шестернях редуктора имеется определенный люфт, который также не принимается во внимание. Под влиянием всех этих факторов, которые мы здесь подробно рассмотрели, при выполнении цикла повторяющихся команд script-файла положение руки-манипулятора будет каждый раз немного различаться.
Читать дальшеИнтервал:
Закладка:








