Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
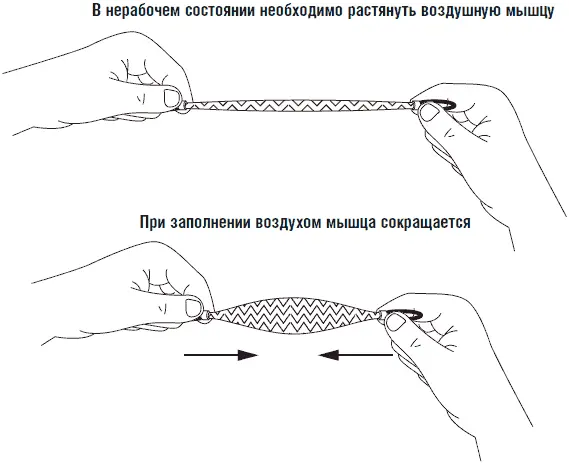
Рис. 16.1 Принцип работы воздушной мышцы
Детали системы воздушной мышцы
На рис. 16.2 приведены рисунки деталей, необходимых для создания воздушной мышцы. Деталь 1 – это собственно воздушная мышца (что очевидно). Деталь 2 – воздушный клапан на три положения. Трехпозиционный воздушный клапан позволяет управлять работой мышцы вручную (см. рис. 16.3).

Рис. 16.2. Необходимые части для экспериментов с воздушной мышцей
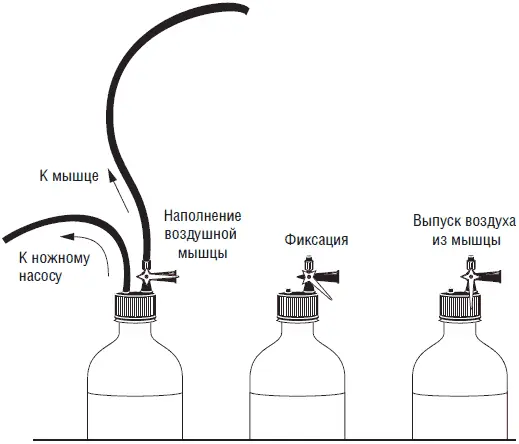
Рис. 16.3. Трехпозиционный воздушный клапан для управления воздушной мышцей
Деталь 3 – переходник крышки бутылки с предохранительным клапаном (клапан открывается при давлении более 4,2 кгс). Переходник крышки бутылки позволяет использовать стандартные полиэтиленовые бутылки из-под газированной воды в качестве воздушных резервуаров. Предохранительный клапан автоматически стравливает избыточный воздух, когда давление превышает заданный предел.
Деталь 4 – полиэтиленовая бутылка из-под газированной воды, используемая в качестве воздушного резервуара. Пластиковая бутылка легко выдерживает давление 3,5 кгс. Я проверял подобные бутылки из-под газированной воды статическим давлением до 7 кгс. Предупреждение: Ни в коем случае не используйте в качестве воздушного резервуара стеклянные бутылки. Небольшая трещина в бутылке или ее случайное падение могут привести к взрыву бутылки, сопровождающемуся разлетом стеклянных осколков. Перекачка пластиковой бутылки может привести только к ее раздуванию.
Деталь 5 – переходник ножного насоса, а деталь 6 – собственно воздушный насос. Обычный ножной насос с манометром способен создать давление в бутылке до 7 кгс. Из-за малой емкости пластиковых бутылок давление в 3,5 кгс достигается в них после четырех «качков» ножного насоса. Воздушная мышца использует очень небольшое количество воздуха, поэтому в небольшой полиэтиленовой бутылке содержится достаточно воздуха для четырех или пяти полных циклов работы. Деталь 7 представляет собой нейлоновые кабельные стяжки, которые используются для быстрого привязывания воздушной мышцы к другим механическим деталям.
На рис. 16.4 показан общий вид всей системы в сборе. В некоторых случаях вам придется воспользоваться эпоксидным клеем для склейки некоторых деталей для предотвращения их «выскакивания» под давлением. Например, если вы собираетесь использовать трехпозиционный воздушный клапан для экспериментов с воздушной мышцей исключительно совместно с переходником крышки бутылки, то можете постоянно вклеить клапан в переходник.
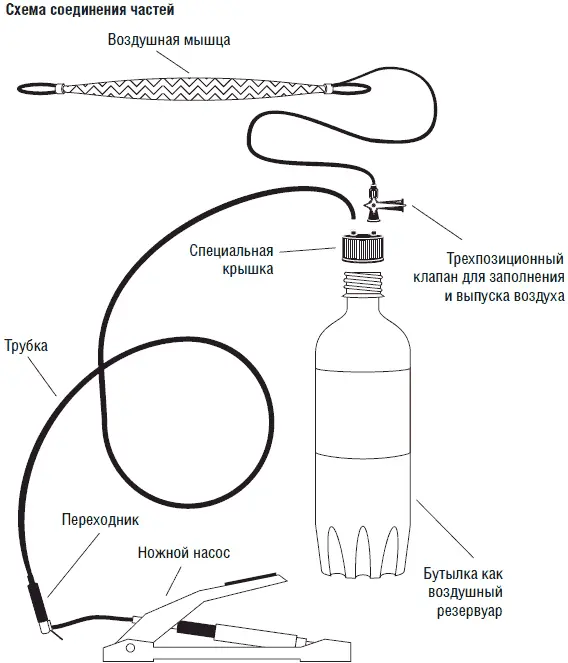
Рис. 16.4. Общая схема соединения частей установки
Крепление воздушной мышцы к другим механизмам
Воздушная мышца изготовлена из мягкой внутренней трубки, заключенной в прочный пластиковый рукав. Конструкция скреплена металлическими зажимами с каждой стороны. Концы пластикового рукава согнуты в петлю, имеющую отверстие. Петля с отверстием обладает большой механической прочностью и может быть использована для соединения воздушной мышцы с другими механизмами. На рис. 16.5 изображен винт, вставленный в отверстие петли.

Рис. 16.5. Винт проходит через одну из петель воздушной мышцы
Использование переходника воздушного насоса
Приобретенный вами воздушный насос имеет стандартный носик (сопло), как показано на рис. 16.6. Нам будет необходимо заменить стандартный носик специальным переходником. Поднимите запирающий рычажок, как показано на рис. 16.7. Удалите стандартный носик (см. рис. 16.8) и вставьте воздушный переходник (см. рис. 16.9). Закройте запирающий рычажок, нажав на него вниз.

Рис. 16.6. Сопло ножного насоса

Рис. 16.7. Поднимите запирающий рычажок (над соплом ножного насоса)

Рис. 16.8. Удалите стандартное сопло-переходник

Рис. 16.9. Вставьте переходник в ножной насос
У вас Кока Кола или Пепси Кола?
Вам нужно будет достать пластиковую полиэтиленовую бутылку. Простейший способ – купить бутылку газированной воды. Убедитесь, что бутылка сделана именно из пластика. Не покупайте бутылку объемом более 1 литра. Идеальной является бутылка 0,5 литра. Я пробовал навинчивать переходник на бутылки разных емкостей вплоть до 2 литров, и он подошел ко всем.
Используйте содержимое бутылки, а затем вымойте бутылку теплой водой. Перед использованием бутылка должна быть совершенно сухой. Интересен тот факт, что если случайно уронить полную бутылку с газированной водой, то результирующее давление углекислого газа, высвобожденного из карбоната натрия, значительно превысит 3,5 кгс – предел, установленный нами для подобных бутылок. Компании по производству газированных напитков изготовляют полиэтиленовые бутылки с таким расчетом, чтобы они выдерживали быстрое повышение давления газа, возникающее при случайном падении бутылки. Я не осознавал этого факта до того, как начал работать с воздушными мышцами, и думаю, что так бы и не узнал. Помните, что в конструкции воздушных мышц нельзя использовать стеклянные бутылки.
Изготовление первого демонстрационного устройства
Первое демонстрационное устройство, которое мы собираемся сделать, очень просто по конструкции и может быть использовано для измерения степени сокращения воздушной мышцы (см. рис. 16.10). Основание представляет собой дощечку толщиной 25х 50х 275 мм. Я использовал подобный материал, поскольку его можно найти повсюду. С тем же успехом вы можете использовать металл или пластик. На каждом из концов я просверлил отверстие под винты 3 миллиметров длиной 45 мм. Винты вставлены в отверстие и закреплены с помощью двух 3 мм гаек, по одной с каждой стороны дощечки. Головка винта и часть резьбы выступают над дощечкой примерно на 20 мм.
Читать дальшеИнтервал:
Закладка:








