Вертолет, 2004 №2

- Название:Вертолет, 2004 №2
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2004
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вертолет, 2004 №2 краткое содержание
Вертолет, 2004 №2 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Ошибка слежения за целью с учетом качества системы стабилизации и подбора коэффициентов управления в системе «человек-машина» представляет угловую величину и составляет около 0,2° т. д. (тысячных дальности).
Современные системы управления позволяют «держать» ракету на траектории относительно ЛВ «в трубке» 0,5–0,6 м независимо от дальности.
Если привести эти компоненты ошибки к линейным размерам в картинной плоскости на удалении 5000 м и просуммировать их, получившаяся суммарная погрешность окажется несколько больше 1 (1,2–1,3 м), то есть выше принятого нами для ВТО критерия.
Из вышесказанного следует, в частности, несостоятельность предложения разместить КН и КУ на самостоятельных стабилизированных платформах, связав их между собой следящей системой, так как в лучшем случае при этом вклинивается ошибка в дистанционном сопряжении КН и КУ (не менее 2'), которая добавит к «промаху» дополнительно 3–4 м (на дальности 5000 м), что совершенно неприемлемо, так как система перестанет быть высокоточной.
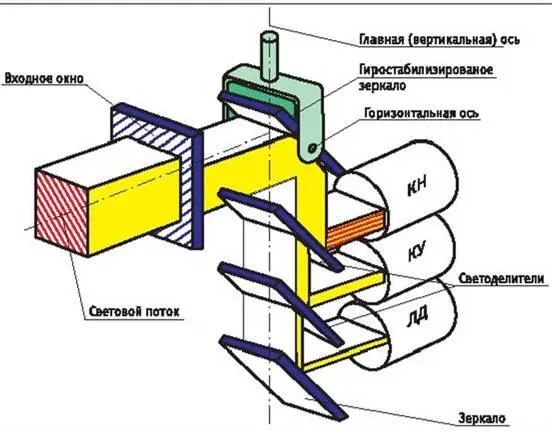
Рис. 2. Принципиальная схема «зеркальной» обзорно-прицельной системы
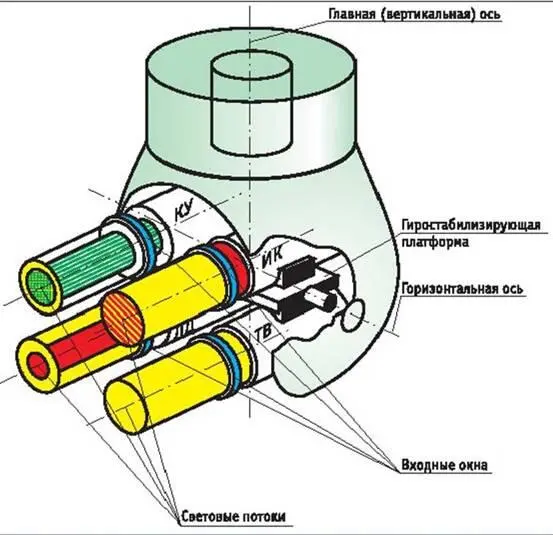
Рис. 3. Принципиальная схема «платформенной» обзорно-прицельной системы
Таким образом, обзорно-прицельная система для реализации ВТО должна состоять, как минимум, из канала наблюдения и канала управления, оптические оси которых взаимно съюстированы и стабилизированы в инерциальном пространстве.
Для работы в дневное время канал наведения должен включать в себя оптический или телевизионный канал или оба эти канала. Если же система должна работать круглосуточно, в КН обязательно должен входить и тепловизионный датчик. Помимо этого, как правило, в состав обзорноприцельной системы включается лазерный дальномер.
Существуют две принципиально различающиеся конструктивные схемы построения обзорно-прицельных систем. В основе первой лежит гиростабилизированное зеркало, на плоскость которого сведены все необходимые каналы, размещенные неподвижно (рис. 2). Эту систему мы будем впоследствии называть «зеркальной», а вторую, в которой все каналы размещаются на единой стабилизированной платформе — «платформенной» (рис. 3).
Первую группу представляют отечественные приборы «Радуга», «Шквал» и иностранные разработки BEZU, SFIM, АРХ-334 и ряд других. Ко второй группе относятся российские приборы типа ГОЭС, американские системы TADS, М-65, французские Strix, Osiritis, Viviane и ряд других. Рассмотрим особенности обоих вариантов, их преимущества и недостатки.
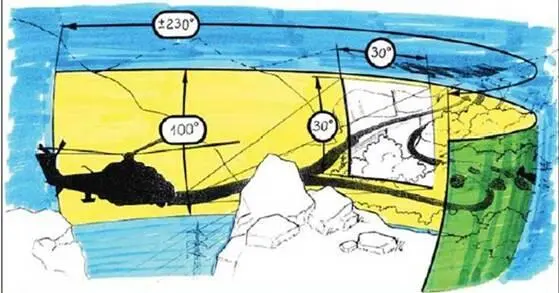
Рис. 4. Зона обзора обзорно-прицельной системы
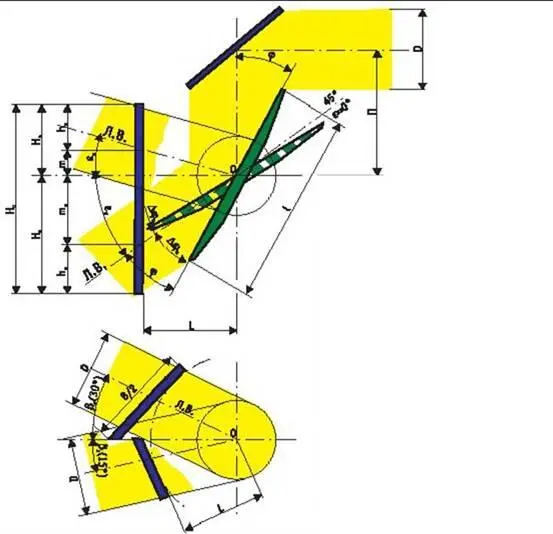
Рис. 5. Схема геометрических параметров «зеркальной» системы
D — диаметр светового потока
в в. н— угол места (верх, низ)
β п.л.-угол азимута (право, лево)
Л.В. -линия визирования
L-длина зеркала
L— расстояние до входного отверстия
Н а— высота входного окна
В б— ширина входного окна
Н в. н— высота верхней (нижней) части входного окна
m в.л.— проекция ЛВ на плоскость
h в.н.— часть светового потока в плоскости окна
φ — угол падения (отражения)
Δφ в.л.— поворот зеркала относительно нулевого положения (4–5 гр.)
П — «перископичность»
ξ в.н.— предельное значение угла места (верх, низ)
Первая задача, которая возлагается на обзорно-прицельную систему (ОПС), — это поиск и обнаружение целей. Для этого ОПС должна иметь максимально возможную зону просмотра в связанной системе координат вертолета. Это позволяет производить разведку местности, не накладывая ограничений на траекторию полета вертолета. Иными словами, ОПС должна обеспечивать перемещение ЛВ по горизонтали и вертикали по командам операторов в широких диапазонах (рис. 4).
В «зеркальной» системе это достигается изменением наклона зеркала для перемещения ЛВ по вертикали и поворотом узла зеркала вокруг вертикальной оси для перемещения JIB по горизонтали. Конструктивно «зеркальная» ОПС, как правило, выполняется в виде перископа, у которого головное зеркало подвешено на кардане, гиростабилизировано и управляется по двум осям.
Поворот зеркала вокруг горизонтальной оси приводит к угловому перемещению ЛВ в вертикальной плоскости на удвоенный угол. Размеры зеркала зависят от диаметра пропускаемого светового потока (D), по этому его ширина примерно равна D, а длина зависит от диапазона перемещения ЛВ по вертикали (рис. 5 и 6).
Из графика L=f( ξ ) на рис. 6 видно, что при достижении угла места около 48° происходит удвоение длины зеркала от номинального, а при 60° — утроение. Соответственно растут габариты всей головной части прибора, отодвигается и растет по размерам входное окно (см. рис. 6). Увеличение размера зеркала, кроме веса, увеличивает его момент инерции по «кубу». Если в «платформенных» системах момент инерции подвижной части является стабилизирующим, то есть полезным фактором, то в «зеркальных» системах это вредный фактор, так как приходится преодолевать инерцию зеркала и поворачивать его один к одному, а точно на половину угла перемещения ЛВ.
Из графика Н o= f( ξ ) можно увидеть, как растут размеры входного окна при увеличении «прокачки» ЛВ по вертикали. Для прибора с диапазоном перемещения ЛВ по вертикали Δξ =+20–30° размер входного окна составляет около 1,9 D, для приборов с Δξ =+20–40° — около 2,4 D, а для Δξ =+20–50° — около 3,22 D. При этом нужно помнить, что толщина оптических защитных стекол должна составлять не менее 10 % от линейного размера стекла.
Как уже говорилось, сканирование ЛВ по горизонтали в «зеркальной» системе осуществляется поворотом рамки головного зеркала относительно вертикальной оси. Перископическая система, как это видно на рис. 7, имеет свойство разворота поступающего на вход изображения при повороте головного зеркала относительно вертикальной оси. При повороте ЛВ по горизонтали на угол В на такой же угол наклоняется изображение в окуляре (на экране МФИ). Для устранения этого явления при конструировании оптических перископических приборов, работающих в видимом участке спектра, применяются специальные компенсационные устройства в виде разворачивающихся призм («Дове», «Пехана»), помещенных на участке параллельного светового пучка. При конструировании «ночных» систем, работающих в ИК-диапазоне, с объективом большого диаметра создание подобных компенсационных устройств практически нереально, поскольку слишком велики габариты и вес призмы, большие потери на светопропускание и высокая цена материала.
Читать дальшеИнтервал:
Закладка: