Владимир Живетин - Человеческий риск (системные основы управления)

- Название:Человеческий риск (системные основы управления)
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, ООО Информационно-издательский центр «Бон Анца»
- Год:2012
- Город:Москва
- ISBN:978-5-986640-70-9, 978-5-905883-13-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Человеческий риск (системные основы управления) краткое содержание
Риски и безопасность обусловлены взаимоотношением человека с социо-природной системой при реализации потребностей человека и среды согласно возможностям человека и среды.
В монографии излагаются основные фрагменты расчета человеческих рисков на системном уровне, когда система синтезирована на структурно-функциональном уровне.
Человеческий риск (системные основы управления) - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Человеческий риск будем оценивать величиной вероятности выхода фактической модели состояния динамической системы, в том числе динамической биосистемы – человека, из области допустимых состояний. Таким образом, мы хотим выделить те ситуации, которые ведут к потерям, т. е. связаны с риском. Для анализа процесса жизнедеятельности введем гипотезы В 1и В 2.
Гипотеза В 1 . Фактическое состояние динамической системы, характеризуемое моделью F ф , находится в области допустимых состояний, т. е. F ф  Ω доп .
Ω доп .
Гипотеза В 2 . Хотя бы один объект-подсистема динамической системы имеет фактическое состояние, которое находится вне допустимой области, т. е. F ф  Ω доп .
Ω доп .
При этих двух гипотезах динамическая система с помощью системы контроля формирует две модели А 1и А 2, представленные в виде двух сигналов-событий:
А 1 = { F k Ω o доп } , А 2 = { F k Ω o доп }.
Ситуация, когда справедлива гипотеза В 1и выполняется событие А 1, соответствует такому функционированию человека и используемых им систем контроля, при которых цель жизнедеятельности выполняется, т. е. нет потерь, нет риска. Вероятность пересечения этих событий обозначим через Р 1 = Р ( В 1 ∩ А 1).
В случае когда реализуются гипотеза В 1и событие А 2, у человека создается ложное представление (оценка) о состоянии динамической системы, и эта оценка создается по причине возникновения погрешности δ F . Вероятность такого события Р 2= Р ( В 1 ∩ А 2).
Событие В 2 ∩ А 1означает, что фактическое состояние контролируемого объекта находится вне области допустимых состояний, риск велик, а концептуальная модель F к указывает человеку, что все в порядке, и динамическая система достигает цель, риска нет. Обозначим вероятность этого события Р 3 = ( В 2∩ А 1) как вероятность часто реализуемой ситуации риска.
Рассмотрим гипотезу В 2и событие А 2. Эта ситуация соответствует такому состоянию динамической системы, в том числе человека, при котором цель жизнедеятельности не выполняется, так как фактическое значение F находится вне области допустимых состояний. Такая ситуация обусловлена как ошибками самого человека δ 1 F, так и неопределенностью внешней информации δ 2 F. Вероятность этого события обозначим Р 4 = Р ( В 2∩ А 2).
Рассматриваемые события образуют полную группу несовместных событий, и поэтому  = 1. С целью упрощения дальнейших выкладок, учитывая сказанное выше, поставим в соответствие: модели F ф процесс x ф ; модели F к процесс x изм , когда модели F ф соответствует вектор фактических параметров состояния x ф ( t ), модели F к соответствует вектор измеренных x изм ( t ) или оценочных состояний. На рис. 1.8 представлена диаграмма событий В i , A j ( i = 1,2; j = 1,2) для случая, когда на х накладывается ограничение сверху, т. е. область допустимых значений х должна быть меньше x в д оп .
= 1. С целью упрощения дальнейших выкладок, учитывая сказанное выше, поставим в соответствие: модели F ф процесс x ф ; модели F к процесс x изм , когда модели F ф соответствует вектор фактических параметров состояния x ф ( t ), модели F к соответствует вектор измеренных x изм ( t ) или оценочных состояний. На рис. 1.8 представлена диаграмма событий В i , A j ( i = 1,2; j = 1,2) для случая, когда на х накладывается ограничение сверху, т. е. область допустимых значений х должна быть меньше x в д оп .
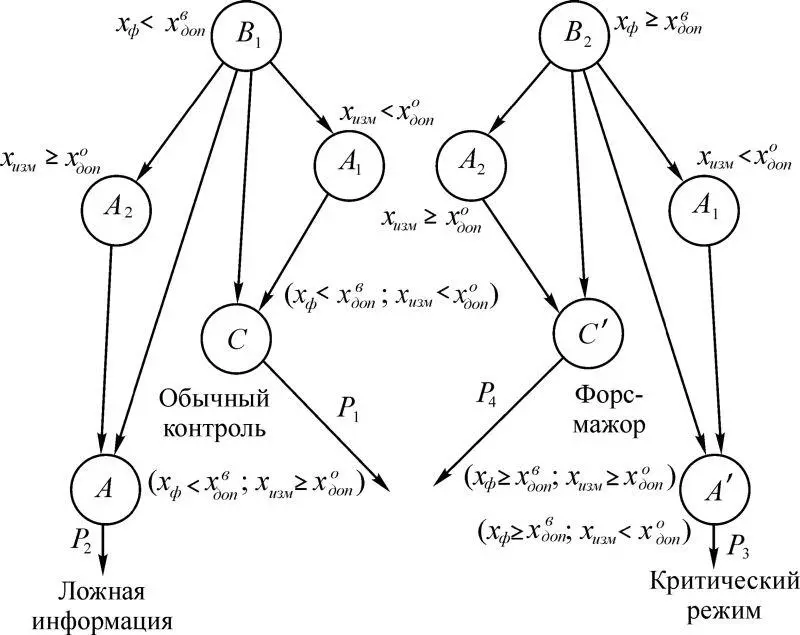
Рис. 1.8
Для решения задачи анализа необходимо установить связь между вероятностями Р i  , допустимыми значениями векторов x ф , x изм , а также плотностями вероятностей векторов x ф и x изм . С этой целью, учитывая определения,
, допустимыми значениями векторов x ф , x изм , а также плотностями вероятностей векторов x ф и x изм . С этой целью, учитывая определения,
В 1 = { x ф ( t ) Ω доп ( t )  t | t 0, T ]}, В 2 = { x ф ( t ) Ω доп ( t ) t | t 0, T ]},
t | t 0, T ]}, В 2 = { x ф ( t ) Ω доп ( t ) t | t 0, T ]},
A 1 = { х изм ( t ) Ω пр доп ( t ) t | t 0, T ]}, A 2 = { х изм ( t ) Ω пр доп ( t ) t | t 0, T ]},
представим рассматриваемые вероятности в виде:
Р 1 = Р {[ x ф ( t ) Ω доп ( t )] ∩ [ х изм ( t ) Ω пр доп ( t )]},
Р 2 = Р {[ x ф ( t ) Ω доп ( t )] ∩ [ х изм ( t ) Ω пр доп ( t )]},
Р 3= Р {[ x ф ( t ) Ω доп ( t )] ∩ [ х и зм ( t ) Ω пр доп ( t )]};
Р 4 = Р {[ x ф ( t ) Ω доп ( t )] ∩ [ х изм ( t ) Ω пр доп ( t )]}.
При этом риск характеризуется векторной величиной P = ( P 2, P 3 , P 4), включающей в себя вероятности P 2 , P 3, обусловленные погрешностями оценки, и вероятность P 4, обусловленную одновременно выходом х ф из области Ω доп и х о из Ω o доп .
В дальнейшем будем предполагать, что множества из Ω доп , Ω о доп образуют односвязные области ω доп и ω о доп соответственно. Тогда для искомых вероятностей получим:
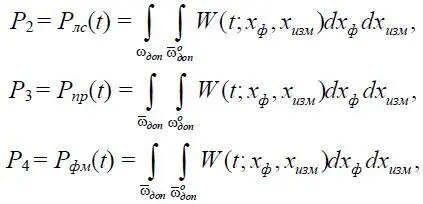
где W ( t ; x ф, x изм ) – совместная плотность вероятности компонент-векторов x ф и х изм в момент времени t;  ,
,  – области, образованные множествами
– области, образованные множествами  ,
,  , которые представляют собой дополнения к Ω доп , Ω о доп .
, которые представляют собой дополнения к Ω доп , Ω о доп .
Интервал:
Закладка: