Вячеслав Абросимов - Групповое движение интеллектуальных летательных аппаратов в антaгонистической среде

- Название:Групповое движение интеллектуальных летательных аппаратов в антaгонистической среде
- Автор:
- Жанр:
- Издательство:Array Литагент «ИД Наука»
- Год:2013
- Город:Москва
- ISBN:978-5-9902335-8-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Вячеслав Абросимов - Групповое движение интеллектуальных летательных аппаратов в антaгонистической среде краткое содержание
Для научных работников, преподавателей, аспирантов, специалистов в области ракетно-космической техники, студентов вузов указанного профиля.
Групповое движение интеллектуальных летательных аппаратов в антaгонистической среде - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Муравьиные алгоритмы представляют собой вероятностную так называемую «жадную» эвристику, где вероятности устанавливаются исходя из информации о качестве решения, полученной из предыдущих решений. Они могут использоваться как для статических, так и для динамических комбинаторных оптимизационных задач.
Идея муравьиного алгоритма – моделирование поведения муравьев, связанного с их способностью быстро находить кратчайший путь от муравейника к источнику пищи и адаптироваться к изменяющимся условиям, находя новый кратчайший путь. При своем движении муравей метит путь феромоном, и эта информация используется другими муравьями для выбора пути. Это элементарное правило поведения и определяет способность муравьев находить новый путь, если старый оказывается недоступным.
Итак, на пути цепочки идущих муравьев возникает преграда (рис. 5). Дойдя до преграды, муравьи с равной вероятностью будут обходить ее справа и слева. То же самое будет происходить и на обратной стороне преграды. Однако те муравьи, которые случайно выберут кратчайший путь, будут быстрее его проходить, и за несколько передвижений он будет более обогащен феромоном. Поскольку движение муравьев определяется концентрацией феромона, то следующие будут предпочитать именно этот путь, продолжая обогащать его феромоном до тех пор, пока этот путь по какой-либо причине не станет недоступен.
Очевидная положительная обратная связь быстро приведет к тому, что кратчайший путь станет единственным маршрутом движения большинства муравьев. Моделирование испарения феромона – отрицательной обратной связи – гарантирует, что найденное локально оптимальное решение не будет единственным – муравьи будут искать и другие пути. Если мы моделируем процесс такого поведения на некотором графе, ребра которого представляют собой возможные пути перемещения муравьев, в течение определенного времени, то наиболее обогащенный феромоном путь по ребрам этого графа и будет являться решением задачи, полученным с помощью муравьиного алгоритма.
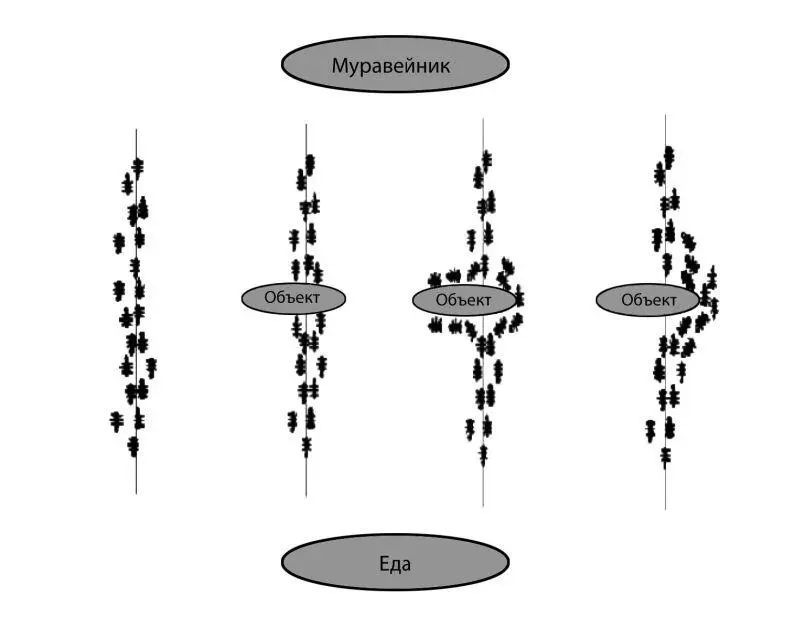
Рис. 5. Принятие решений группой муравьев (рисунок взят из работы [23])
Нетрудно сделать общий вывод о том, что непрямой обмен информацией, когда некто (нечто) изменяет некоторую область среды, а другие некто (нечто) используют эту информацию, является основой формирования правил принятия решений по формированию пути движения.
В целом для целей настоящей работы подчеркнем, что описанные выше элементы природных алгоритмов могут быть активно использованы и в задачах принятия решений по движению группировок объектов. Однако для этого требуется четкое понимание постановок задач.
Глава 2. Характеристики группового движения летательных аппаратов
Иду медленно, но зато я никогда не двигаюсь назад.
Авраам Линкольн, 16 - й президент США (1861–1865)Совместное поведение различных объектов управления в процессе движения изучается в рамках многих научных дисциплин. Выделим наиболее известные.
Распределенный искусственный интеллект. Эта область искусственного интеллекта занимается самыми общими аспектами коллективного поведения объектов управления. Основу составляют результаты, полученные в теории распределенных систем и теории принятия решений.
Теория игр. Аппарат теории игр часто используется для исследования поведения нескольких объектов управления. Исследуются кооперативные игры, различные стратегии ведения переговоров и др., которые являются аналогами ряда моделей коллективного поведения.
Теория коллективного поведения автоматов. Она исследует поведение больших коллективов объектов управления (автоматов) с примитивными функциями. Поведение автомата может рассматриваться как недетерминированное, что позволяет строить различные вероятностные модели. Допускается обучение автомата при помощи штрафов и поощрений. Автомат может быть наделен памятью, в которой он в некоторой форме запоминает предыдущие штрафы и поощрения, и может использовать эту информацию для улучшения своего и коллективного поведения в соответствии с некоторой функцией, описывающей преимущества.
2.1. Классификация задач исследования движения группы летательных аппаратов
В авиации под групповым полетом подразумевается совместный полет двух или более самолетов в общем боевом порядке под управлением командира (ведущего). Однако групповое движение высокоскоростных средств, к которым относятся, например, боевые части стратегических ракет, крылатые ракеты большой дальности, гиперзвуковые ракеты, несколько отличается от указанного, прежде всего отсутствием ведущего и невозможностью в настоящее время оценки обстановки в режиме on-line.
Достаточно полная теоретическая классификация задач, связанных с организацией и исследованием группового движения, приведена в работе [6]. К наиболее важным следует отнести цели группы, количество так называемых сенсоров (элементов оборонительной системы), степень централизации планирования траекторий движения и др.
Кратко прокомментируем ряд положений такой классификации (рис. 6).
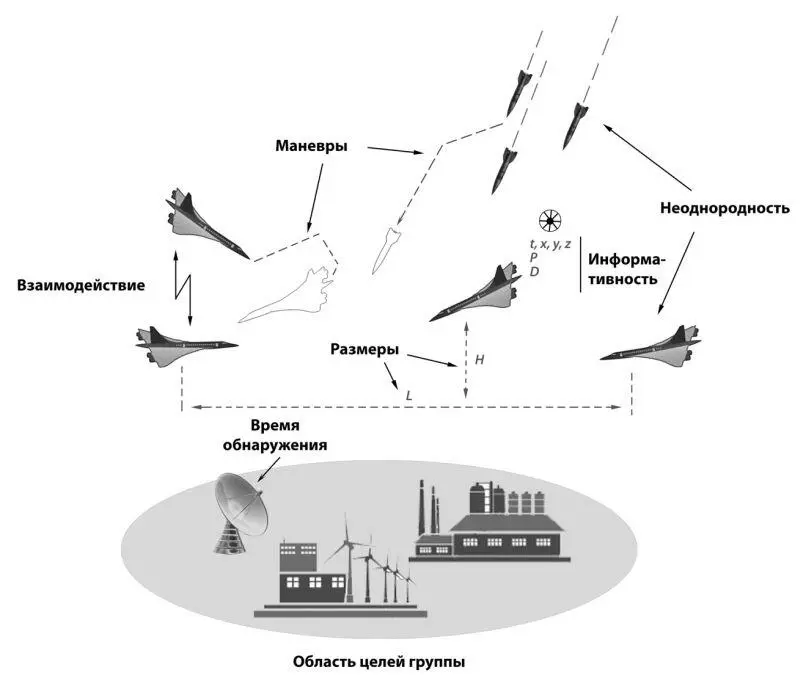
Рис. 6. Группировка летательных аппаратов и ее групповые свойства
Целевое назначение группы. Цели у группы могут быть заданы различным образом: одна/несколько, подвижные/неподвижные и др. Однако для рассматриваемых ниже задач эти понятия можно дополнить тем, какие цели ставятся перед конкретными объектами управления. В этом смысле могут задаваться цели прорыва ограничений, обхода ограничений, «жертвования» для выполнения боевой задачи, выполнения объектом управления функций информационного «разведчика», и ряд других.
Мы будем в дальнейшем также предполагать, что для всей группы задана единая цель движения – приход к объектам, расположенным в рамках некоторой области. При этом цель необязательно единственная; допускается задание не просто совокупности целей, а также порядка их достижения.
Информативность группы о пространстве движения и объекте обороны. Как правило, основную недоопределенность вносят не столько местоположение, сколько потенциальные характеристики возможностей средств обороны. При этом следует выделить две основные задачи – задачу обнаружения и задачу поражения.
Информативность при решении задачи обнаружения состоит в том, на каком расстоянии D объект обнаруживается и с какой степенью достоверности P это происходит. Задача обнаружения математически представляет собой задачу распознавания образов. Для успешного решения таких задач необходимо располагать как можно более полной информацией о функциях яркости объектов и фона, а также знать параметры распределения шумов. Качество решения задачи существенно зависит от выбранной системы признаков и соответствующей классификации.
Читать дальшеИнтервал:
Закладка: