Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние

- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Жанр:
- Издательство:ФОТОН
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние краткое содержание
Книга носит преимущественно справочно-ознакомительный характер и написана по результатам обзоров и анализа многочисленных литературных и интернет-источников. Она знакомит читателя со сложившимися на сегодняшний день терминологией и классификацией в области беспилотной авиации, с современными тенденциями в производстве беспилотных летательных аппаратов, а также с состоянием рынка беспилотных авиационных систем.
Беспилотная авиация: терминология, классификация, современное состояние - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

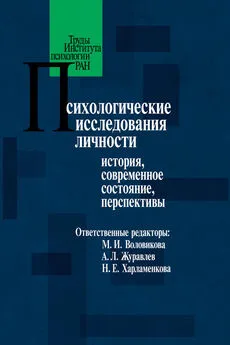
Y4Copter

HexaCopter

H6Copter

Y6Copter

OctoCopter

Butte rflyCopter
TwinQuadCopter
Трикоптер – самая простая схема построения мультикоптеров. Обычно трикоптер движется двумя винтами вперед, а третий является хвостовым. Первые два винта имеют противоположные направления вращения и взаимно компенсируют реактивные закручивающие моменты, у хвостового же винта пары нет, поэтому для компенсации его реактивного момента ось вращения этого винта немного наклоняют в сторону, противоположную направлению закручивания. Это делают с помощью специального сервопривода и тяги (рис. 1.47), которые используются для стабилизации или управления положением аппарата по курсу.

Рис. 1.47. Трикоптер и сервопривод отклонения его хвостового ротора
Однако существуют производные от трикоптера схемы построения, в которых отсутствуют механически подвижные части, и корпуса всех двигателей жестко зафиксированы на своих местах. Причем один (в У4-коптере) или все три двигателя (в Y6- коптере, рис. 1.48) имеют симметричные им относительно горизонтальной плоскости двигатели с толкающими винтами, направленными вниз. Управление курсовым углом и направлением перемещения осуществляется за счет изменения соотношения частот вращения винтов.

Рис. 1.48. У6-коптер
Квадрокоптер (quadcopter, quadrotor) – самая распространенная схема построения мультикоптеров. Наличие четырех жестко зафиксированных роторов дает возможность организовать довольно простую схему организации движения. Существуют две таких схемы движения: схема "+" и схема "х" (рис. 1.46). В первом случае один из роторов является передним, противоположный ему – задним, и два ротора являются боковыми. В схеме"х" передними являются одновременно два ротора, два других являются задними, а смещения в боковом направлении также реализуются одновременно парой соответствующих роторов. Алгоритм управления частотами вращения винтов для схемы "+" несколько проще и понятнее, чем для схемы "х", однако последняя используется все же чаще из-за конструктивных преимуществ: при такой схеме проще разместить фюзеляж, который может иметь вытянутую форму, бортовая видеокамера имеет более свободный обзор. То, каким образом квадрокоптер совершает элементарные маневры, понятно из рис. 1.49. Иллюстрация приведена для случая схемы "+".
Из рисунка видно, что одна пара винтов вращается по часовой стрелке, другая – против. Если частоты вращения пар одинаковы, то аппарат неподвижен относительно вертикальной оси. Если увеличить частоту вращения для одной пары на Af а для другой – уменьшить на ту же величину Af (чтобы сохранить общий вертикальный вектор тяги неизменным), то будет реализован поворот влево или вправо вокруг вертикальной оси. При одновременном одинаковом изменении частот вращения всех винтов будет осуществляться подъем или снижение квадрокоптера. Для движения в каком-либо направлении (вперед, назад, влево, вправо) двигатель, соответствующий направлению желаемого смещения, должен уменьшить частоту вращения на Af противополжный ему – увеличить на Af а два других – оставить без изменения.
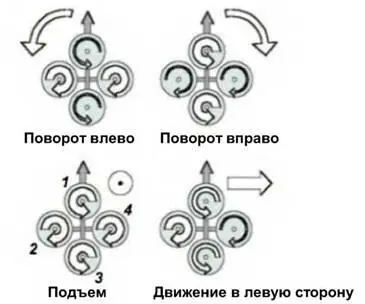
Рис. 1.49. Принцип движения квадрокоптера (схема "+")

Рис. 1.50. Состав оборудования квадрокоптера
Типичный состав оборудования квадрокоптера показан на рис. 1.50. Для аппаратов с другим количеством роторов он аналогичен.
Команды, принятые приемником, поступают в полетный контроллер в виде широтно-импульсного сигнала. Здесь они с учетом текущей навигационной информации (получаемой в самом полетном контроллере от встроенных микросистемных гироскопов и акселерометров), а также с учетом сигналов с модуля GPS (опционально) преобразуются в широтно-импульсные сигналы управления двигателями, которые подаются на контроллеры частоты вращения двигателей (т.н. ESC – Engine Speed Control). Назначение модулей ESC – преобразование управляющих широтно-импульсных сигналов в синусоидальные трехфазные напряжения для обмоток бесколлекторных электродвигателей. Типичный источник питания для бортсети мультикоптеров – это батарея литий-полимерных аккумуляторов. Потребляемые токи – от единиц до сотен ампер в зависимости от размеров аппарата.
Основное назначение мультикоптеров – это фото- и видеосъемка различных объектов, поэтому они, как правило, оснащаются управляемыми подвесами для камер (рис. 1.51).

Рис. 1.51. Квадрокоптер (схема "+") с видеокамерой
Компоновка оборудования на мультикоптере может быть самой различной. Модуль GPS обычно стараются выносить отдельно как можно дальше от сильноточных цепей. Для защиты пропеллеров часто предусматривают специальные охватывающие ограждения (рис. 1.52).
Для увеличения подъемной силы и повышения живучести аппарата часто объединяют на одной балке тянущий и толкающий винты с соответствующими двигателями (рис. 1.53).

Рис. 1.52. Квадрокоптер с защитой пропеллеров (вверху – GPS-модуль)

Рис. 1.53. Квадрокоптер (схема "х") с совмещенными тянущими и толкающими винтами
Гексакоптеры и октокоптеры, имеющие соответственно по 6 и 8 роторов (рис. 1.54 – 1.55), обладают гораздо большей грузоподъемностью по сравнению с квадрокоптерами. Они также способны сохранять устойчивый полет при выходе из строя одного ротора. Такие аппараты отличаются также гораздо меньшим уровнем вибраций, что особенно важно для видеосъемки.
Читать дальшеИнтервал:
Закладка:

![Борис Поршнев - Загадка «снежного человека» [Современное состояние вопроса о реликтовых гоминоидах]](/books/1061048/boris-porshnev-zagadka-snezhnogo-cheloveka-sovreme.webp)