Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние

- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Жанр:
- Издательство:ФОТОН
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние краткое содержание
Книга носит преимущественно справочно-ознакомительный характер и написана по результатам обзоров и анализа многочисленных литературных и интернет-источников. Она знакомит читателя со сложившимися на сегодняшний день терминологией и классификацией в области беспилотной авиации, с современными тенденциями в производстве беспилотных летательных аппаратов, а также с состоянием рынка беспилотных авиационных систем.
Беспилотная авиация: терминология, классификация, современное состояние - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Рис. 1.28. Пример беспилотного вертолета, построенного по двухвинтовой соосной схеме – КО АХ Х-240 фирмы Swiss UAV (Швейцария, 2010)
Двухвинтовая поперечная схема (англ.: side-by-side rotor helicopter): вертолеты имеют два несущих винта, установленных по бокам фюзеляжа на консолях крыла или фермах. Реактивные моменты уравновешиваются противоположным направлением вращения винтов, которые могут иметь перекрытие при количестве лопастей менее 4-х. Достоинства схемы: аэродинамическая симметрия схемы; небольшие индуктивные потери на режиме горизонтального полета, что повышает экономичность и дальность полета; относительно высокая грузоподъемность. Недостатки схемы: сложность конструкции системы управления и трансмиссии, необходимость синхронизации вращения винтов, дополнительная масса и лобовое сопротивление фермы, поддерживающей крыло.
В истории мирового вертолетостроения, пожалуй, самым известным вертолетом, построенным по такой схеме, является, советский вертолет Ми-12 разработки ОКБ M.Л. Миля (рис. 1.29). Однако, большой популярностью в пилотируемой авиации эта схема не пользовалась. В беспилотной авиации в последние годы наблюдается рост интереса к двухвинтовой поперечной схеме. Однако она используется, как правило, не в чистом виде, а именно: из соображений простоты конструкции для управления движением используется не автоматы перекоса, а различные другие технические решения (рис. 1.30).

Рис. 1.29. Вертолет, построенный по двухвинтовой поперечной схеме (вертолет Ми-12 1967 года постройки – самый большой в мире вертолет, диаметр несущего винта 35 м, максимальная взлетная масса 105 т)

а

б

в

г
Рис. 1.30. Концепты беспилотных вертолетов, основанные на двухвинтовой поперечной схеме
Например, для управления движением могут использоваться:
– дополнительный небольшой хвостовой винт, вращающийся в горизонтальной плоскости – для управления углом тангажа (рис. 1.28, а);
– управляемые заслонки на выходе импеллеров (рис. 1.30, а);
– повороты (на небольшой угол) вокруг своей оси балок с укрепленными на их концах роторами (рис. 1.30, б, в, г);
– небольшие отклонения балок с роторами в вертикальной плоскости относительно точек их крепления (рис. 1.30, г);
– изменение соотношения частот вращения винтов и др.
Очень часто в беспилотных вертолетах, построенных по двухвинтовой поперечной схеме, используют не открытые винты, а винты, защищенные кольцевым кожухом (англ.: ducted fan), или импеллеры (рис. 1.30, а, в). Это увеличивает эффективность винтов и делает более безопасными полеты в условиях возможных столкновений с препятствиями.
Легкие БПЛА, построенные по данной схеме, часто называют бикоптерами (англ.: bicopter, twincopter, dualcopter). Их можно классифицировать также как подкласс мультикоптеров (см. далее – табл. 1.3).
Двухвинтовая продольная схема (англ.: tandem rotor helicopter). У таких вертолетов реактивный момент компенсируется за счет противоположного направления вращения винтов, которые расположены один за другим вдоль фюзеляжа (рис. 1.31). Несущие винты располагаются с перекрытием, причем задний винт имеет превышение, чтобы уменьшить вредное влияние на него потока от переднего винта. Достоинство схемы – большой объем грузовой кабины. Недостатками являются сложная система трансмиссии, необходимость синхронизации вращения несущих винтов, большие индуктивные потери при горизонтальном полете и переменные нагрузки на несущих винтах, а также сложная посадка при авторотации.

Рис. 1.31. Пример беспилотного вертолета, построенного по двухвинтовой продольной схеме – DP-6 Whisper компании Dragonfly Pictures (США, 2007). Назначение: разведка, ретрансляция ТВ-сигнала. Длина 3,35 м. Диаметр ротора 3,2 м. Максимальная взлетная масса 215 кг, масса полезной нагрузки 34 кг. Скорость 185 км/ч. Продолжительность полета 5,5 ч. Двигатель: ДВС, 97 л.с.
Схема с перекрещивающимися несущими винтами (синхроптер) (англ.: intermeshing rotor helicopter). У таких вертолетов несущие винты расположены по бокам фюзеляжа, а их оси наклонены наружу (рис. 1.32). Из-за наклона винтов реактивные моменты уравновешиваются только относительно вертикальной оси, а их проекции относительно поперечной оси складываются, образуя момент тангажа, что необходимо учитывать при расчете продольной устойчивости. Достоинством схемы являются малые габариты вертолета, а недостатками – необходимость синхронизации вращения винтов, сложная система трансмиссии, большой уровень вибраций, возникновение продольного момента, усложняющего балансировку вертолета. Вертолет хорошо приспособлен для вертикального подъема грузов.

Рис. 1.32. Синхроптер К-МАХ фирмы Kaman Aerospace (США). Беспилотная версия разрабатывается совместно с фирмой Lockheed Martin. Способен перевозить грузы массой до 2,7 тонны на расстояние до 500 километров. Максимальная скорость до 185 км/ч. В 2011 г. использовался в Афганистане в беспилотном режиме для доставки боеприпасов.
Реактивный вертолет (англ.: tip jet helicopter). У таких вертолетов механический привод несущего винта заменен реактивным. Суммарный крутящий момент на втулке несущего винта близок к нулю, так как момент несущего винта от сил сопротивления воздуха уравновешивается моментом, создаваемым тягой реактивных двигателей или сопел, установленных на концах лопастей (рис. 1.33).
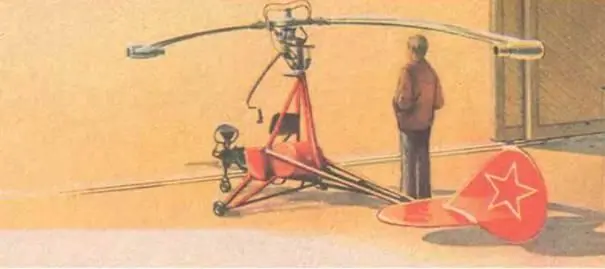
Рис. 1.33. Экспериментальный реактивный мини-вертолет с пульсирующими реактивными двигателями, установленными на концах лопастей (СССР, 1947 год)
При этом отпадает необходимость в мощном рулевом винте. Реактивный привод несущего винта может осуществляться, например, установкой на концах лопастей реактивных двигателей различного типа, топливо к которым подается через втулку и лопасти винта. Достоинствами вертолетов с реактивным приводом являются простая система трансмиссии и высокая весовая отдача. К недостаткам следует отнести сложную конструкцию втулки и лопасти несущего винта, трудность создания специальных двигателей, работающих в поле центробежных сил, большой расход топлива, а также шум от прямоточных и пульсирующих воздушно-реактивных двигателей.
Читать дальшеИнтервал:
Закладка:

![Борис Поршнев - Загадка «снежного человека» [Современное состояние вопроса о реликтовых гоминоидах]](/books/1061048/boris-porshnev-zagadka-snezhnogo-cheloveka-sovreme.webp)