Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние

- Название:Беспилотная авиация: терминология, классификация, современное состояние
- Автор:
- Жанр:
- Издательство:ФОТОН
- Год:2014
- Город:Уфа
- ISBN:978-5-9903144-3-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Фетисов - Беспилотная авиация: терминология, классификация, современное состояние краткое содержание
Книга носит преимущественно справочно-ознакомительный характер и написана по результатам обзоров и анализа многочисленных литературных и интернет-источников. Она знакомит читателя со сложившимися на сегодняшний день терминологией и классификацией в области беспилотной авиации, с современными тенденциями в производстве беспилотных летательных аппаратов, а также с состоянием рынка беспилотных авиационных систем.
Беспилотная авиация: терминология, классификация, современное состояние - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
1.2.2.3. БПЛА вертолетного типа
Этот тип аппаратов известен также как БПЛА с вращающимся крылом (англ.: rotary-wing UAV, rotorcraft UAV, helicopter UAV). Часто их называют также VTOL UAV (Vertical Take-off and Landing UAV) – БПЛА с вертикальным взлетом и посадкой. Последнее не совсем корректно, так как в общем случае вертикальный взлет и посадку могут иметь и БПЛА с неподвижным крылом (например, как в СВВП – за счет реактивного сопла, при взлете и посадке направляемого вертикально вниз).
Подъемная сила у аппаратов этого типа также создается аэродинамически, но не за счет крыльев, а за счет вращающихся лопастей несущего винта (винтов). Крылья либо отсутствуют вовсе, либо играют вспомогательную роль. Очевидными преимуществами БПЛА вертолетного типа являются способность зависания в точке и высокая маневренность, поэтому их часто используют в качестве воздушных роботов.
Существует множество схем построения аппаратов вертолетного типа [33, с. 14-17]. Все рассматриваемые далее схемы построения вертолетов сведены в таблицу 1.3.
Рассмотрим более подробно каждую из схем.

Классическая одновинтовая схема с хвостовым рулевым винтом
Двухвинтовая поперечная схема
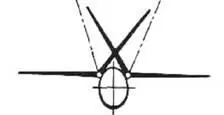
Схема с перекрещивающимися несущими винтами

Вертолеты с крылом

Двухвинтовая соосная схема

Двухвинтовая продольная схема

Реактивные вертолеты
Винтокрылы

Автожиры

Конвертопланы

Многовинтовые вертолеты (мультикоптеры)
Одновинтовая схема (англ.: single rotor helicopter). Это летательный аппарат с приводным несущим винтом, который при подъеме аппарата вращается в горизонтальной плоскости. Вертолет движется горизонтально за счёт наклона плоскости вращения винта. Чаще всего используется классическая одновинтовая схема с хвостовым рулевым винтом (рис. 1.25). Реактивный крутящий момент у таких вертолетов уравновешивается рулевым винтом, расположенным на хвостовой балке на некотором расстоянии от оси несущего винта. Создавая тягу в плоскости, перпендикулярной вертикальной оси вертолета, рулевой винт компенсирует реактивный момент. Изменяя тягу рулевого винта, можно управлять вертолетом относительно вертикальной оси. Большинство современных вертолетов выполнено по одновинтовой схеме. Достоинством схемы является простота конструкции и системы управления. К недостаткам следует отнести большие габариты за счет хвостовой балки и потери мощности на привод рулевого винта (до 10% от мощности двигателя), уязвимость и опасность повреждения рулевого винта при полете у земли.

Рис. 1.25. Пример беспилотного вертолета, построенного по одновинтовой схеме с хвостовым рулевым винтом – RQ-8A Fire Scout, разработанный компанией Northrop Grumman (США, 2005)
Существуют, однако, варианты реализации одновинтовой схемы, в которых функцию хвостового винта выполняют другие элементы, например, фенестрон (от фр. fenestron – маленькое окно). Это закрытый рулевой винт вертолёта, устанавливаемый в специальный профилированный канал, встроенный в киль вертолета. Пример – вертолет ЕС 120В франко-германской фирмы Eurocopter (рис. 1.26). В отличие от обычных рулевых винтов с 2 или 4 лопастями, фенестроны обычно имеют более 8 лопастей. Преимущества фенестрона: большая безопасность; большая скорость вращения; меньшие шумность и уровень вибраций; существенно более низкие, по сравнению с обычным рулевым винтом, затраты мощности при горизонтальном полете. Недостатки: большая масса; высокая стоимость и высокие требования к тяге двигателя.
Другой способ обойтись без хвостового рулевого винта – применение т.н. технологии NOTAR (от англ. NO TAil Rotor). Суть технологии поясняется на рис. 1.27, а.

Рис. 1.26. Фенестрон на вертолете ЕС 120В компании Eurocopter (2003)
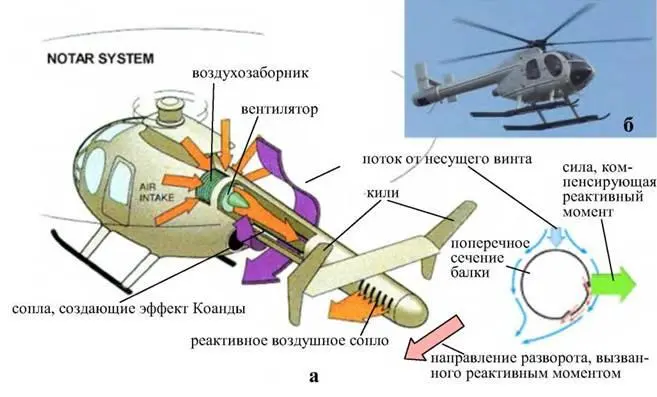
Рис. 1.27. Система NOTAR: а – принцип действия; б – вертолет MD 520N компании MD Helicopters
В хвостовой части фюзеляжа (у основания хвостовой балки) расположен вентилятор, приводящийся в движение от редуктора несущего винта. Вентилятор создаёт поток воздуха, выходящий через два узких длинных сопла на правой стенке хвостовой балки, заставляя нисходящий поток воздуха от несущего винта, обдувающего балку, отклоняться влево, создавая аэродинамическую силу, направленную вправо (проявление эффекта Коанды). Кроме того, для управления используется реактивное воздушное сопло на конце хвостовой балки и кили. Достоинства системы NOTAR заключаются в повышении безопасности и значительном снижении уровня шума. Вертолёты, оборудованные этой системой, – одни из самых "тихих". Вертолёты, использующие систему NOT AR, производятся компанией MD Helicopters (США).
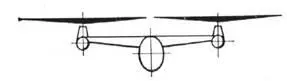
Двухвинтовая соосная схема (англ.: coaxial rotor helicopter): вертолеты имеют два несущих винта, расположенных на одной оси, с противоположным направлением вращения, за счет чего и компенсируются реактивные моменты (рис. 1.28). Плоскости вращения винтов удалены друг от друга для предотвращения схлестывания лопастей нижнего и верхнего винтов на всех режимах полета. Достоинством схемы являются малые габариты. Недостатки схемы: сложная система трансмиссии и управления, недостаточная путевая устойчивость на авторотации.
Читать дальшеИнтервал:
Закладка:

![Борис Поршнев - Загадка «снежного человека» [Современное состояние вопроса о реликтовых гоминоидах]](/books/1061048/boris-porshnev-zagadka-snezhnogo-cheloveka-sovreme.webp)