Леонид Гримак - Моделирование состояний человека в гипнозе

- Название:Моделирование состояний человека в гипнозе
- Автор:
- Жанр:
- Издательство:ЛИБРОКОМ
- Год:2009
- Город:Москва
- ISBN:978-5-397-00750-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Леонид Гримак - Моделирование состояний человека в гипнозе краткое содержание
Книга будет полезна психологам, психотерапевтам, медикам, использующим гипноз в исследованиях состояния человека.
Моделирование состояний человека в гипнозе - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
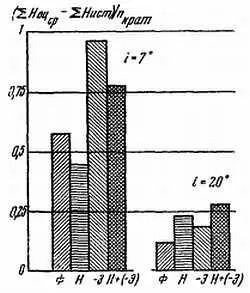
Рис. 49. График визуальной оценки глубины кратеров в зависимости от моделируемого состояния операторов
ΣНоц — средняя суммарная оценка глубины кратеров; Σист — истинная суммарная глубина кратеров; i— угол освещения; n— число кратеров, Ф— фоновые данные; Н— внушенная гиповесомость тела; Э— эмоциональное напряжение; Н+( -Э) — сочетание «гиповесомости тела» с эмоциональным напряжением
Визирование лунного рельефа при угле освещения i = 7° на фоне субъективных переживаний сниженной весомости тела снижает точность метрической оценки на 14 %.
Моделируемое эмоциональное напряжение с внушенной установкой, что недостаточная точность оценки связана с угрозой для объекта, наоборот, повышает надежность работы на 40 %.
Характерно, что переживание того же эмоционального состояния на фоне пониженной весомости (вес тела субъективно равен 6 кг) повышает точность визуальной метрической оценки лишь на 30 %. Следовательно, состояние гиповесомости способствует снижению качества указанного вида деятельности. Это может быть связано с явлением глазодвигательной дискоординации: как видно на рис. 48, в ряде случаев движения глаз становятся более медленными и размашистыми, в результате чего площадь, описываемая электрофизиологическим импульсом и изолинией, возрастает относительно фоновых данных. В то же время, как это видно на рис. 49, визуальная оценка глубины кратеров при угле освещения i = 20° становится точнее во всех случаях моделируемых психических состояний в среднем на 10–15 %.
Изменение точности зрительной оценки крутизны склонов лунного рельефа находится в очень сложной зависимости от различных психических состояний и условий освещения и визирования. Средние данные, характеризующие эту зависимость, представлены на рис. 50. Наиболее общей закономерностью и здесь оказывается повышение точности работы при моделируемом эмоциональном напряжении. Субъективное переживание частичной весомости тела нередко сопровождается тенденцией к снижению точности визуальных метрических оценок.
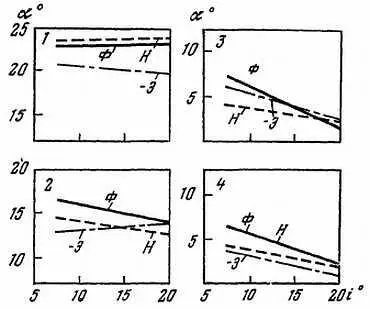
Рис. 50. График визуальной оценки крутизны склонов при различных моделируемых состояниях операторов
α — угол визирования; i° — угол освещения; Ф— фоновые данные; Н— при внушенном снижении веса; — Э— при психическом напряжении; 1— 4— данные четырех испытуемых
Таким образом, как показывают результаты экспериментов, психическое состояние оператора в значительной степени отражается на изменении функций зрительного восприятия и в частности функций метрических оценок воспринимаемых объектов применительно к условиям лунного рельефа. В зависимости от специфики переживаемого состояния оно может повышать или снижать эту функцию. Проектирование и разработка соответствующих технических систем должны учитывать это свойство оператора и уровни колебания его надежности в данном виде деятельности.
Динамика слежения дискретного характера.Исследование уровня работоспособности космонавта-оператора по выполнению задач астронавигации с моделированием различных психических состояний проводилось на аналого-цифровом комплексе автономной навигации пилотируемого космического летательного аппарата (КЛА).
Аналого-цифровой комплекс состоял из имитаторов небесной сферы и земной поверхности, управляющей электронной цифровой вычислительной машины (ЭЦВМ) «Днепр», аналого-вычислительной машины «Мн-10» и действующего макета секстант-визира (СВ). В качестве имитатора небесной сферы был использован плоский планшет, в котором смонтированы самолетные малогабаритные лампы, имитирующие участок северного неба, описанный радиусом 40° вокруг Полярной звезды. Имитатор земной поверхности представлял собой специальную цветную карту участка местности, наблюдаемого с высоты полета 200 км. Для описания анализа деятельности космонавта-оператора, включенного в аналого-цифровой комплекс, использовался специальный функционально-алгоритмический метод.
Основными задачами данной серии исследований являлись:
— изучение уровня работоспособности космонавта-оператора по выполнению астронавигационных операций с использованием космического секстант-визира в условиях моделирования отдельных факторов космического полета пилотируемого КЛА (невесомость, психическое напряжение, вестибулярные воздействия, засветка оптических каналов секстанта) и в условиях отсутствия этих факторов;
— разработка на основании экспериментальных данных конкретных рекомендаций, относящихся к тренажным средствам подготовки космонавта-оператора для выполнения астроизмерений с применением космического секстант-визира.
Все испытуемые проходили предварительную теоретическую и практическую подготовку, а затем тренировались в работе с секстант-визиром до получения устойчивых результатов.
Оценка качества выполнения операций на моделирующем стенде осуществлялась по временным, точностным и интегральным характеристикам. Временные показатели выполнения астронавигационных операций в системе «оператор — СВ» характеризуют одну из сторон эффективности работы оператора. В основу математической модели времени выполнения оператором астроизмерений положена стохастическая модель обучаемости (Р. Буш, Ф. Мостеллер, 1962). Точностные показатели работы оператора определялись посредством регистрации ошибок астроизмерений по четырем каналам секстант-визира с помощью ЭЦВМ «Днепр» и соответственно статистически обрабатывались. Интегральные оценки качества работы оператора (оценка качества переходного процесса астроизмерений) имели целью дать общую оценку скорости и точности астронавигационных операций.
Временные характеристики работы оператора регистрировались по следующим показателям:
— время выполнения астроизмерений в системе «оператор-СВ», исчисляемое с момента подачи сигнала на начало работы (загорание лампочки) до момента окончания наведения (нажатие кнопки);
— время рабочей реакции оператора, исчисляемое с момента подачи сигнала на начало работы до момента первого движения ручками управления;
— время принятия решения об окончании наведения, исчисляемое с момента окончания управляющих движений до нажатия кнопки, сигнализирующей об окончании наведения.
Читать дальшеИнтервал:
Закладка: