В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Во втором случае информацию о границах разрядных интервалов извлекают из самой кодовой посылки. Если в соседних разрядах кодовой посылки присутствуют разные цифры, то границу можно легко выделить как по положительному (между нулем и единицей), так и по отрицательному (между единицей и нулем) перепадам в командном сигнале.
На рис. 1.2, б командный сигнал отображает кодовую комбинацию 1100. В этом случае границу между разрядами на приемной стороне определить будет невозможно. В практических конструкциях используют модифицированный командный сигнал (рис. 1.2, в ), получаемый путем смешивания исходного командного сигнала и тактовых импульсов.
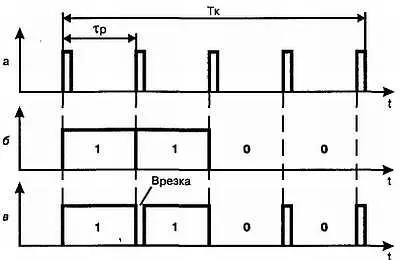
Рис. 1.2. Структура командной посылки:
а— тактовые импульсы; б— командный сигнал; в— модифицированный командный сигнал
Как видно из рисунка, граница между разрядами, содержащими нули, просто индицируется тактовым импульсом, а граница между соседними единицами — специальными врезками, представляющими инверсии тактовых импульсов. В главе 5 будет показано, что из модифицированного командного сигнала при помощи простых схемотехнических решений можно легко восстановить тактовые импульсы, необходимые для правильной дешифрации команды.
В качестве дешифраторов кодово-импульсных команд используются стандартные микросхемы цифровых дешифраторов.
1.2.2. Пропорциональное управление
Параметры, подлежащие регулировке
При использовании пропорционального управления моделью регулировке подлежат следующие параметры:
♦ скорость вращения электродвигателя (например тягового в модели автомобиля);
♦ угол отклонения рулевого устройства (передние колеса автомобиля, руль высоты у авиамодели и т. п.).
Принцип формирования команд управления здесь одинаков, однако исполнительные устройства существенно отличаются друг от друга. В первом случае такое устройство называется регулятором хода и, как правило, должно обеспечивать только плавное изменение величины и полярности напряжения, питающего двигатель. Во втором случае применяются рулевые машинки, двигатели которых работают кратковременно (только в период установки рулевого устройства в новое положение), обеспечивая пропорциональную зависимость между текущими положениями ручки управления на пульте передатчика и углом поворота рулевого устройства.
Определение. Управляющим сигналом называют отклонение ручки управления на пульте передатчика, а командным сигналом — соответствующую ему электрическую величину [как правило, напряжение u( t )]. Параметр движения модели, подлежащий управлению, — регулируемой величиной .
Принцип дискретной передачи непрерывного управляющего воздействия
Рассмотрим принцип дискретной передачи непрерывного управляющего воздействия. В случае пропорционального управления регулируемая величина может принимать любые значения в заданном интервале. Например угол поворота передних колес автомобиля должен иметь возможность плавно изменяться в пределах ±60°. Очевидно, управляющий сигнал должен вести себя аналогичным образом — последовательно принимая все возможные значения в определенном диапазоне.
Это, в свою очередь, означает, что и передаваемый командный сигнал должен быть величиной непрерывной. При необходимости управления двумя и более регулируемыми величинами возникает проблема параллельной передачи нескольких командных сигналов.
Известны два способа решения этой задачи. В первом случае каждому из командных сигналов выделяется свой канал связи, и тогда возможна одновременная передача всех команд. При использовании радиосвязи рабочие частоты каналов необходимо разносить для исключения их взаимного влияния. Передатчики и приемники такой аппаратуры должны быть многочастотными, поэтому в эфире потребуется относительно широкая полоса частот.
Устройства получаются громоздкими и дорогостоящими. Такой способ называется частотным уплотнением каналови применяется в профессиональной аппаратуре специального назначения.
Второй способ — временное уплотнение — предполагает последовательную во времени передачу командных сигналов различных каналов. Очевидно, в этом случае сигналы уже не могут быть непрерывными во времени, но это оказывается и не обязательным. Известно, что подвижное изображение на экране телевизора создается путем проецирования на него 25 неподвижных картинок в секунду. Другими словами, непрерывный процесс, например движения автомобиля, заменяется последовательностью его неподвижных изображений через небольшие промежутки времени.
Если правильно выбрать величину этих промежутков, то дискретность изображения ощущаться не будет. Подобным образом, непрерывный командный сигнал u( t ) можно заменить передачей его значений U1, U2, U3 и т. д. в отдельные моменты времени (рис. 1.3, а ).
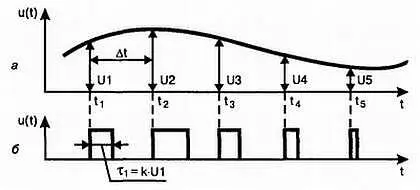
Рис. 1.3. Принцип дискретизации сигналов:
а— аналоговый командный сигнал; б— дискретный командный сигнал
Такие значения называют отсчетами сигнала. Чем резче меняется во времени командный сигнал, тем чаще должны следовать отсчеты. Теорема Котельникова дает точный рецепт по выбору максимально возможного промежутка времени Δ t , при котором не нарушается плавность изменения регулируемой величины:
Δ t=< 1/2 f в,
где f в— наибольшая частота в спектре командного сигнала.
Эта величина зависит от максимально необходимой скорости изменения регулируемой величины управляемой модели и для большинства из них не превышает 25 Гц (соответствующее максимальное значение Δ t = 20 мс). Таким образом, период обновления информации о значении управляющего сигнала ( Т п) каждого канала может быть выбран равным 20 мс. Именно такое значение используется в большинстве образцов аппаратуры пропорционального управления как промышленного производства, так и самодельной.
Выбор параметров дискретного управляющего сигнала
Значение отсчета, полученное в момент времени t 1, необходимо передать на управляемую модель до момента очередного отсчета t 2. Сделать это можно разными способами. В аппаратуре управления моделями обычно передается прямоугольный импульс, длительность которого ( τ ) пропорциональна значению отсчета Выбор параметров дискретного управляющего сигнала(рис. 13, б , где «к» — коэффициент пропорциональности).
Читать дальшеИнтервал:
Закладка: