В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Способа кодирования, иллюстрированного рис. 1.3, было бы достаточно в случае однополярного командного сигнала. Реальный сигнал должен нести информацию не только о величине отклонения ручки управления на пульте, но и направлении этого отклонения. Поэтому окончательно командный сигнал представляет собой последовательность импульсов, называемых канальными, опорная длительность которых, соответствующая нейтральному положению ручки управления, выбирается равной
τ 0= 1,5 мс,
а отклонение ручки либо в одну, либо в другую сторону учитывается соответственно увеличением или уменьшением длительности в пределах Δ τ = ±0,5 мс. Результирующая длительность канального импульса ( τ к), очевидно, может лежать в пределах
τ к= 1–2 мс.
В этом случае не длительность, а ее отклонение (от опорного значения — Δ τ ) пропорционально команде.
Период обновления команды для одного канала был выбран равным 20 мс. Нетрудно подсчитать, что за один период можно передать, в принципе, командные сигналы десяти каналов. На практике последние четыре миллисекунды каждого периода используются для передачи специального синхронизирующего импульса , индицирующего границу между соседними периодами. Таким образом, максимальное число каналов уменьшается до восьми.
Приведенные значения являются стандартными для промышленной и любительской аппаратуры, однако совсем не обязательны: придерживаться их имеет смысл в том случае, когда требуется обеспечить совместимость самодельных и покупных узлов. Принципиальными же ограничениями на параметры командных импульсов являются, с одной стороны, желаемая плавность изменения регулируемой величины, а с другой — допустимая ширина канала связи.
Сформированные вышеописанным способом канальные импульсы далее управляют работой передатчиков.
В конечном счете, последовательность импульсов каждого из каналов на выходе приемника бортовой части аппаратуры выглядит так же, как и передаваемые канальные импульсы (рис. 1.3, б ).
Рассмотрим процедуры их дальнейшей обработки для управления регуляторами хода и рулевыми машинками.
Канал регулятора хода
На рис. 1.4, а изображены два соседних периода канальных импульсов. Поскольку скорость изменения передаваемой команды невелика по сравнению с частотой следования импульсов, их длительность в соседних периодах отличается незначительно.
Пусть для определенности длительность канального импульса больше опорной ( τ к> τ 0). Так как информация о длительности передаваемой команды содержится в разности Δ τ = τ к — τ 0, в первую очередь ее и необходимо восстановить.
Для этой цели передним фронтом принятого канального импульса запускают местный опорный генератор , работающий в ждущем режиме. Длительность вырабатываемых им импульсов должна быть равной τ 0= 1,5 мс (рис. 1.4, б ). Далее производится вычитание этих импульсов с получением разностных (рис. 1.4, в ).
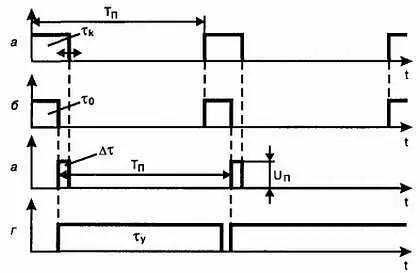
Рис. 1.4. Принцип восстановления командного сигнала:
а— канальные импульсы; б— опорные импульсы; в— разностные импульсы; г— напряжение, подаваемое на двигатель
Очевидно, что при отклонении ручки управления от нейтрального положения до крайнего, длительность разностных импульсов будет меняться в пределах Δ τ = 0–0,5 мс. Период их следования ( Т п) по-прежнему равен 20 мс. Непосредственно эти импульсы подавать на двигатель регулятора хода нельзя. Дело в том, что электродвигатель, инерционность ротора которого велика, при питании импульсами напряжения, следующими с частотой 50 Гц, будет играть роль механического фильтра нижних частот. Скорость вращения его ротора будет определяться средним значением напряжения за период следования импульсов, которое можно определить по формуле
U ср= U п· τ/ T п(1.1)
Легко подсчитать, что при амплитуде импульсов, равной напряжению питания (например U п= 12 В), среднее значение напряжения окажется равным U ср= 1225·0,5/20 = 0,3 В даже при максимальном отклонении ручки управления.
По этой причине разностные импульсы в канале регулятора хода необходимо удлинять до величины т у, причем с сохранением пропорциональности удлиненных импульсов углу отклонения ручки управления. Другими словами, необходимо обеспечить равенство
τ у= К у·Δ τ
Если коэффициент удлинения К увыбрать равным 40, то изменение разностного импульса в пределах Δ τ = 0–0,5 мс вызовет изменение удлиненных импульсов в диапазоне τ у= 0 — 20 мс (рис. 1.4, г ). Соответственно среднее значение напряжения, подаваемого на двигатель, определяемое теперь формулой
U ср= U п· τ у/ T п(1.2)
будет меняться от нуля до, примерно, U п= 12 В. Так работают каналы практически всех регуляторов хода.
Помимо удлинения импульсов, в регуляторе хода еще должна быть решена задача распознавания знака передаваемой команды, определяющего направление вращения исполнительного двигателя.
Канал рулевой машинки
Рассмотрим логику работы рулевой машинки . Пусть ручка управления передними колесами модели и сами передние колеса находятся в нейтральном положении. Длительность канального импульса при этом равна τ к= τ 0= 1,5 мс.
Длительность Δ τ = 0 (см. рис. 1.4, а, б, в ). Двигатель рулевой машинки не вращается.
При отклонении ручки управления от нейтрального положения, длительность канального импульса становится больше τ 0(например τ к= 1,7 мс). Удлиненный разностный импульс приводит двигатель во вращение. Механизм поворота, помимо колес, вращает и регулятор длительности опорного импульса, вырабатываемого бортовым генератором. Двигатель остановится в тот момент, когда Δ τ станет равным нулю. В новом установившемся положении длительность опорного импульса опять будет равна длительности командного (в нашем примере τ к= τ 0 = 1,7 мс.)
Вывод.Канал рулевой машинки отличается от канала регулятора хода наличием связи между текущим положением рулевого механизма и длительностью опорных импульсов.
Полезно отметить, что длительность разностного импульса теперь зависит от скорости отклонения ручки управления и, в свою очередь, определяет скорость вращения двигателя рулевой машинки на этапе отработки команды. На эту скорость также влияет коэффициент удлинения импульсов К у, определяющий, в конечном счете, величину напряжения, питающего двигатель рулевой машинки. Аналогично предыдущему случаю, канал должен содержать устройство распознавания знака разностного импульса, несущего информацию о требуемом направлении вращения исполнительного двигателя.
Читать дальшеИнтервал:
Закладка: