В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Несколько слов о параметрах импульсов командной посылки . Для уверенного разделения соседних граничных импульсов на выходе приемника (где их форма будет далеко не идеальной) их длительность не должна превышать половины минимальной длительности канального импульса, т. е. τ г=< 0,5 мс. С другой стороны, уменьшение длительности, как известно, увеличивает ширину спектра импульсов Δ f c~= 1/ τ г. Если используется радиоканал, то при амплитудной модуляции ширина спектра радиосигнала дополнительно увеличится вдвое.
Выше говорилось, что полоса излучаемого сигнала не должна превышать 20 кГц. В этом случае минимально возможная длительность определится формулой τ г >= 1/10 = 0,1 мс. При частотной модуляции той же полосе частот будет соответствовать более протяженный сигнал.
Необходимо учесть еще тот факт, что чем короче импульс, тем меньше его энергия, а значит и дальность действия радиолинии. С учетом приведенных рассуждений целесообразно выбрать τ г= 0,5 мс.
При выбранном периоде повторения и максимальной длительности всех восьми импульсов, минимальная длительность синхропаузы будет равна 4 мс (в два раза длиннее любого канального импульса), чего вполне достаточно для ее уверенного выделения на приемной стороне.
Структурная схема передающей части
После того, как рассмотрены все процедуры, необходимые для формирования командной посылки, легко составить структурную схему устройства передачи команд дистанционного управления (рис. 1.8).
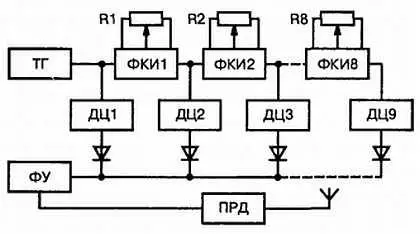
Рис. 1.8. Структурная схема передатчика команд
Во-первых, необходим тактовый генератор (ТГ), определяющий период повторения командной посылки Т п. Задним фронтом тактовых импульсов запускается формирователь первого канального импульса (ФКИ1), длительность которого изменяется потенциометром R1, механически связанным с соответствующей ручкой управления. Задним фронтом ФКИ1 запускается ФКИ2, и так далее (рис. 1.7, а, б, в ).
Импульсы с выхода тактового генератора и канальные импульсы с выходов всех формирователей поступают на дифференцирующие цепи ДЦ1—ДЦ9. С их выходов короткие положительные всплески, соответствующие задним фронтам, проходят через разделительные диоды на запуск формирующего устройства (ФУ), обеспечивающего получение нормированных по длительности и амплитуде граничных импульсов (рис. 1.7, г ).
Сформированной таким образом кодовой посылкой управляется передатчик (ПРД) соответствующего канала связи.
При желании можно использовать любое меньшее количество каналов, отбрасывая лишние ФКИ, ДЦ и диоды, начиная с последних. Период повторения Т ппри этом можно оставить прежним, либо уменьшить на величину 2 n мс, где n — количество отброшенных каналов.
Уменьшение Т пупрощает реализацию удлинителей импульсов в приемной части аппаратуры.
Структурная схема приемной части
Каким бы ни был приемник (позиция 1 на рис. 1.9), принятый и продетектированный сигнал на его выходе будет представлять достаточно искаженное подобие переданной кодовой посылки на фоне шумов. На рис. 1.10 импульсы кодовой посылки в выходном напряжении U 1изображены отрицательными. Для устранения шумов и восстановления прямоугольной формы граничных импульсов (напряжение U 2на рис. 1.10), с одновременной нормировкой их амплитуды, используется компаратор напряжения (2), порог которого U порустанавливается ниже максимального уровня шумовых выбросов.
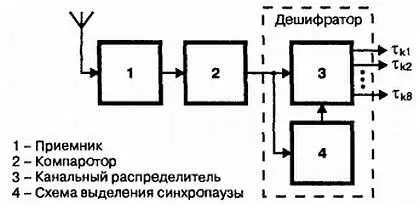
Рис. 1.9. Структурная схема приемной части
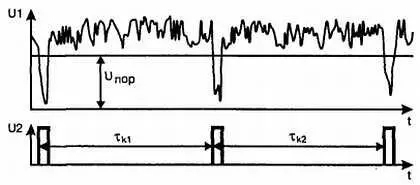
Рис. 1.10. Эпюры напряжений в характерных точках приемной части
Прямоугольные граничные импульсы стандартной амплитуды поступают в канальный распределитель (3), где из них и формируются канальные импульсы с первого по восьмой, поступающие далее каждый на свой выход. Схема выделения синхропаузы, используя граничные импульсы, формирует для канального распределителя сигнал начала очередной кодовой посылки.
Канальные импульсы на выходах распределителя ( τ к1- τ к8) имеют такой же вид, что и на рис. 1.7, а, б и являются универсальными по отношению к исполнительным устройствам. Другими словами, к любому из выходов можно подключать как регулятор хода, так и рулевую машинку. Совместно работающие канальный распределитель и схема выделения синхропаузы называются дешифратором канальных импульсов.
Структурная схема регулятора хода и рулевой машинки
Регулятор хода отличается от рулевой машинки (рис. 1.11) отсутствием механической связи между исполнительным двигателем (6) и потенциометром обратной связи R oc, определяющим длительность опорных импульсов τ 0.
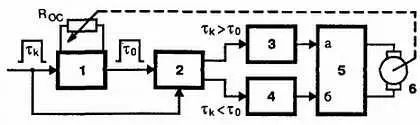
Рис. 1.11. Структурная схема исполнительных устройств
Рассмотрим принципы функционирования регулятора хода. Канальный импульс, длительность которого τ кможет находиться в пределах 1–2 мс, с выхода распределителя подается на один из входов временного различителя (2). Кроме того, своим передним фронтом он запускает генератор опорного сигнала (1), работающий в ждущем режиме.
Вырабатываемый этим устройством опорный импульс длительностью τ 0= 1,5 мс подается на второй вход различителя. Последний работает таким образом, что при τ к> τ 0разностный сигнал Ат появляется на верхнем, по схеме, выходе, а при τ к < τ 0— соответственно на нижнем. Вид разностного сигнала показан на рис. 1.4, в .
Пропорционально растянутые с помощью удлинителей (3) или (4) и усиленные по мощности ключевым усилителем (5) импульсы подаются на тяговый двигатель (6). Направление его вращения будет определяться тем, по какому из входов ( а или б ) поступают удлиненные импульсы, а скорость вращения — средним значением их напряжения, определяемым формулой 1.2.
Отличие рулевой машинкизаключается в том, что двигатель (6) приводит в действие механизм поворота рулевого устройства и изменяет сопротивление резистора R ос, связанного с этим устройством. Резистор, в свою очередь, определяет длительность опорных импульсов τ 0, подаваемых на временной различитель.
Обращаю вниманиена то, что разностные импульсы на выходе временного различителя теперь будут существовать только в течение короткого промежутка времени, требуемого на поворот рулевого устройства в новое устойчивое положение, при котором длительности канального и опорного импульсов выравниваются. Причем по мере подхода рулевого устройства к новому заданному положению, длительность разностных импульсов, а значит и напряжение U ср, питающее двигатель, будут уменьшаться.
Читать дальшеИнтервал:
Закладка: