В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
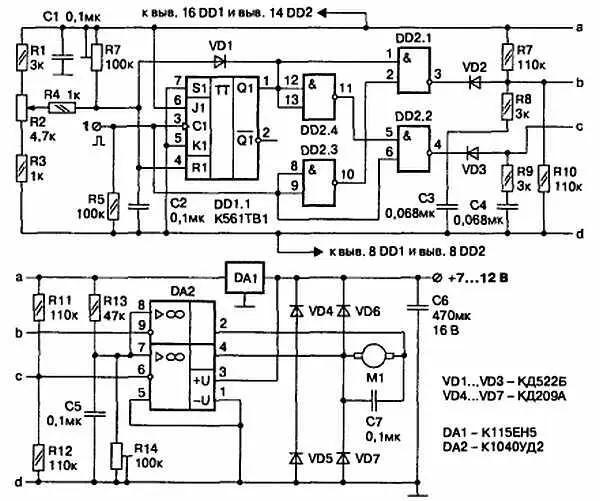
Рис. 7.38. Схема сервоусилителя рулевой машинки. Вариант № 6
Печатная плата приведена на рис. 7.39. Перед монтажом микросхемы DD2 на плату со стороны деталей необходимо установить перемычку П1.
Потенциометр R6 после установки требуемой длительности опорных импульсов при установке на плату заменяется постоянным резистором соответствующего номинала.
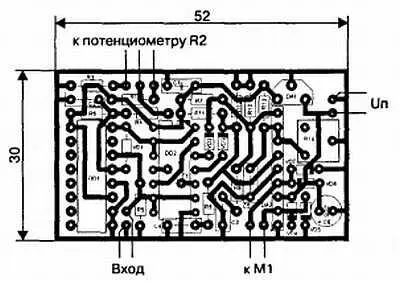
Рис. 7.39. Печатная плата
Ждущий мультивибратори временной дискриминаторможно выполнить по схеме, изображенной на рис. 7.40. В качестве DA1 используется КР1006ВИ1 или ее импортный аналог. Выводу 10 DD1 подключается к диоду VD2, а вывод 11 — к диоду VD3. Понятно, что печатную плату придется скорректировать.
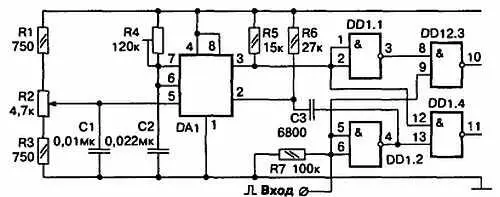
Рис. 7.40. Вариант схемы ждущего мультивибратора
7.3.7. Седьмой вариант рулевой машинки
Принципиальная схема
Компактная рулевая машинка может получиться на основе схемы регулятора хода, опубликованной в [18]. Принципиальная схема соответствующего сервоусилителя изображена на рис. 7.41.
Ждущий мультивибратор и схема формирования разностных импульсов выполнены на элементах DD1.1—DD1.4. Далее следуют удлинители импульсов на элементах VD1, VD2, R4—R9, С3 и С4. Входы специализированной микросхемы управления двигателями DA1 имеют гистерезис, что очень удобно для реализации удлинителя.
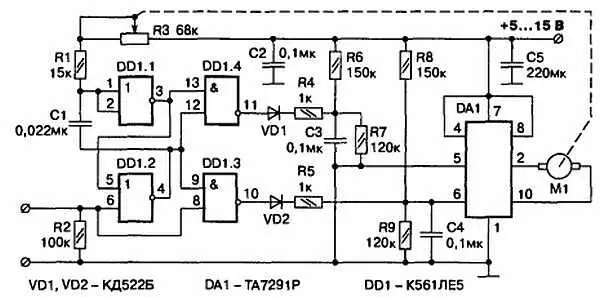
Рис. 7.41. Схема сервоусилителя рулевой машинки. Вариант 7
Детали и конструкция
Печатная плата регулятора хода приведена на рис. 7.42. Микросхема ТА7291Р рассчитана на подключение двигателей с максимальным током, не превышающим 1,2 А. Если нет необходимости в такой мощности, можно использовать микросхему меньших габаритов TA7291S с предельным током 0,4 А. Необходимо только учесть, что цоколевки ТА7291Р и TA7291S — различны. Конденсаторы C1, С3 и С4 являются времязадающими и должны быть обязательно пленочными (например К73-17).
Резистор R3 необходимо механически связать с рулевым устройством. Номиналы резисторов R1 и R3 подбираются таким образом, чтобы в среднем положении рулевого устройства длительность импульса ждущего мультивибратора составляла 1,5 мс, а в крайних положениях изменялась бы на ±0,5 мс.
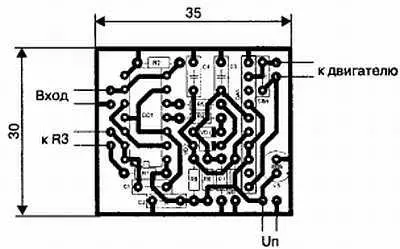
Рис. 7.42. Печатная плата
Настройка
Процедура настройки такая же, как и в варианте № 2. На плате предусмотрено место для конденсатора С бл. Необходимость его установки может возникнуть при использовании относительно мощного двигателя с искрящим коллектором. Признаком этого будет неравномерное, с подергиваниями, движение рулевого устройства. Емкость конденсатора может лежать в диапазоне 0,033—0,1 мкФ.
7.3.8. Восьмой вариант рулевой машинки
Основные положения
Ранее уже упоминалось о том, что в драйверах управления двигателями предусматривается режим эффективного торможения. Для перевода драйвера в этот режим необходимо на оба управляющих входа подавать высокий потенциал. Режим торможения очень полезен в рулевых машинках. Дело в том, что к их работе предъявляются противоречивые требования.
Во-первых, желательно иметь высокую скорость отработки сервопривода, для чего обычно увеличивают коэффициент удлинения импульсов. Во-вторых, подход к новому положению рулевой машинки должен быть плавным, что требует постепенного снижения напряжения, питающего двигатель в процессе отработки команды.
В противном случае возникает колебательный процесс в окрестностях нового положения равновесия. Традиционный способ решения этой задачи заключается в применении скоростной отрицательной обратной связи, как это сделано, например в схеме, изображенной на рис. 7.33.
В остальных вариантах, рассмотренных в книге, просто обеспечивается настройка «компромиссного» коэффициента удлинения разностных импульсов. Это означает, что напряжение питания двигателя в процессе отработки рулевой машинки выбирается таким, при котором колебательный процесс из-за инерционности ротора двигателя еще отсутствует. Но при этом и сама скорость отработки — не максимально возможная.
Принципиальная схема
Принципиальная схема сервопривода, в котором используется режим торможения, приведена на рис. 7.43. Ждущий мультивибратор реализован на элементе DD1.1. Длительность опорного импульса управляется потенциометром R2, механически связанным с редуктором двигателя рулевой машинки.
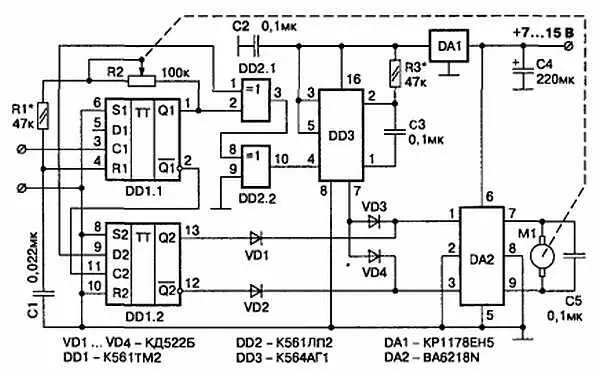
Рис. 7.43. Принципиальная схема сервоусилителя с использованием режима торможения
Роль временного дискриминатора играет элемент DD2.1. После буферного каскада DD2.2 на выводе 10 выделяются разностные положительные импульсы при любом соотношении длительностей опорного и канального импульсов, кроме ситуации, при которой эти длительности равны.
Элемент DD1.2 определяет знак разности. Если канальный импульс длиннее опорного, то высокий потенциал появляется на выводе 13 , при обратной ситуации — на выводе 12 . На микросхеме DD3 собран ждущий мультивибратор с перезапуском. Его длительность импульсов выбрана несколько большей, чем период повторения канальных импульсов.
Удлинитель в схеме отсутствует. Схема работает следующим образом. При равенстве длительностей канального и опорного импульсов, что соответствует какому-либо устойчивому положению рулевой машинки, разностные импульсы на входе ждущего мультивибратора DD3 отсутствуют. На его инверсном выходе (вывод 7 ) присутствует высокий потенциал, который через развязывающие диоды VD1 и VD2 приложен к обоим входам драйвера DA2. Состояние выходов триггера DD1.2 на работу драйвера при этом никак не влияет. Двигатель заторможен.
При поступлении команды на изменение положения рулевого устройства один из импульсов, поступающих на входы временного дискриминатора DD2.1, становится длиннее другого. Какой именно, зависит от направления отклонения рычага управления на пульте передатчика команд. Пусть, для определенности, τ к> τ оп. В этом случае: во-первых, появятся разностные положительные импульсы, поступающие на вход ждущего мультивибратора DD3. С поступлением первого из них мультивибратор начнет формировать собственный импульс. Потенциал на инверсном выходе (вывод 7 DD3) станет равным нулю. Поскольку длительность мультивибратора выбрана больше опорной, то каждый следующий разностный импульс будет его перезапускать, сохраняя низкий потенциал на инверсном выходе.
Читать дальшеИнтервал:
Закладка: