В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями

- Название:500 схем для радиолюбителей. Дистанционное управление моделями
- Автор:
- Жанр:
- Издательство:Наука и техника
- Год:2007
- Город:Санкт-Петербург
- ISBN:978-5-94387-358-4
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Днищенко - 500 схем для радиолюбителей. Дистанционное управление моделями краткое содержание
В данной книге представлены схемные решения СХЕМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МОДЕЛЯМИ. Приводимого краткого описания вполне достаточно для самостоятельного изготовления понравившейся конструкции.
Изготовление моделей само по себе очень увлекательное занятие. Но наибольший интерес представляет изготовление именно управляемых моделей. Они давно получили широкое распространение в Японии, США и Европе. А в России моделирование делает первые шаги: создаются клубы любителей, появляются магазины, торгующие готовыми комплектами (модель и система управления)… Однако фирменные изделия недешевы, да и трудно отказать в себе удовольствии самостоятельно изготовить некоторые элементы и даже комплект целиком!
Данная книга уникальна. Она познакомит читателя с принципами функционирования и практической схемотехникой. Все рассмотренные конструкции выполнены на современной элементной базе, схемы сопровождаются подробными описаниями, рисунками печатных плат, рекомендациями по сборке и настройке.
Книга рассчитана как для начинающих, так и на «продвинутых» радиолюбителей, увлекающихся практической радиоэлектроникой.
500 схем для радиолюбителей. Дистанционное управление моделями - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Во-вторых, появится высокий потенциал на выводе 13 триггера DD1.2. Через диод VD1 он будет воздействовать на вывод 1 драйвера DA2. На втором входе драйвера в это время потенциал нулевой, в чем легко убедиться. К двигателю прикладывается полное напряжение питания, и он вращает рулевое устройство с максимальной скоростью к новому положению равновесия.
Сопротивление потенциометра обратной связи R2 меняется таким образом, что длительность опорного импульса возрастает, уменьшая длительность разностного. Все это будет происходить до тех пор, пока рулевое устройство не займет новое устойчивое положении, и длительности импульсов сравняются.
Запускающие импульсы перестанут поступать на вход ждущего мультивибратора и спустя 21–22 мс на его инверсном выходе установится высокий потенциал, переведя драйвер в режим торможения. За столь небольшое время выходной вал редуктора рулевой машинки провернется на очень малый угол, и потенциометр R2 практически не изменит длительности опорного импульса.
Если команда имеет противоположное значение, то τ оп> τ к, и ситуация будет отличаться от описанной только тем, что высокий потенциал теперь появится на выводе 12 DD1.2, и двигатель будет вращаться в противоположном направлении.
Детали и конструкция
Печатная плата этого варианта сервоусилителя приведена на рис. 7.44. Отверстие под десятую ножку DA3 не высверливается.
Времязадающие конденсаторы С1 и С3 должны быть пленочными. Перезапускаемый мультивибратор можно реализовать на импортной микросхеме CD4047, включив ее по типовой схеме. Печатная плата при этом, очевидно, измениться. Поскольку режим торможения существует практически во всех микросхемах управления двигателями постоянного тока, на месте DA2 можно использовать любой драйвер с учетом его стандартной схемы включения и соответствующей переделкой печатной платы.
В справочнике [17] можно отыскать достаточное количество и полных аналогов используемой микросхемы, что позволит использовать предлагаемую печатную плату без переделки.
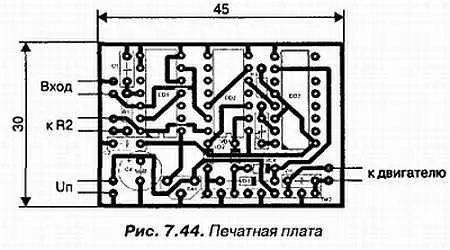
Рис. 7.44. Печатная плата
Настройка
В процессе настройки подбором положения корпуса потенциометра R2 и величины резистора R1 устанавливают требуемую исходную длительность опорного импульса и диапазон ее перестройки так, как это описано в разделе 7.3.2 . Затем подбором величины R3 необходимо установить длительность отрицательных импульсов ждущего мультивибратора на выводе 7 DD3 равной 21–22 мс. Для этой цели временно отключают двигатель от микросхемы драйвера, а на вход устройства подают канальные импульсы при соотношении τ опне равно τ к.
Подключив двигатель, проверяют работу схемы в целом. Если наблюдается колебательный процесс при переходе к новому положению равновесия, необходимо добиться его устранения подключая со стороны печатных проводников между выводом 4 DD3 и корпусом конденсатор, емкость которого подбирается опытным путем в диапазоне 1000—15000 пФ. Этот конденсатор должен подавлять короткие импульсы на выходе временного различителя, которые могут появляться вследствие того, что двигатель останавливается не мгновенно.
7.3.9. Девятый вариант рулевой машинки
Принципиальная схема
Если удастся приобрести специализированную микросхему M51660L, то сервоусилитель можно собрать по ее стандартной схеме включения, изображенной на рис. 7.45. На вход необходимо подавать канальные импульсы положительной полярности и амплитудой 4–5 В. Напряжение питания микросхемы 4,8–7 В. Максимальный ток, отдаваемый в нагрузку, не должен превышать 0,8 А.
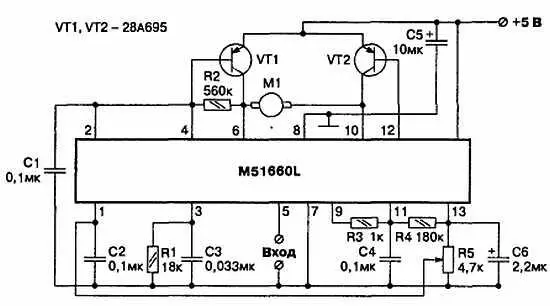
Рис. 7.45. Сервоусилитель на специализированной микросхеме
Детали и конструкция
Печатная плата руленой машинки приведена на рис. 7.46. Транзисторы VT1, VT2 можно заменить ВС327, отечественными КТ814 или любыми другими, с максимальным током коллектора, превышающим ток, потребляемый двигателем.
Основные характеристики двигателей, которые можно использовать в рулевых машинках и регуляторах хода, приведены в приложении 2 .

Рис. 7.46. Печатная плата
Глава 8
МОДЕЛЬ АВТОМОБИЛЯ С ПРОПОРЦИОНАЛЬНЫМ УПРАВЛЕНИЕМ
Специально для данной книги автор разработал радиоуправляемую модель автомобиля. Следуя материалам главы, читатель сможет собрать оригинальную конструкцию, не требующую больших материальных затрат и специальных навыков.
Любую модель, в том числе и автомобиля, можно изготовить, что называется, «с нуля». Однако такой процесс требует от исполнителя определенных навыков, да и необходимый инструмент не всегда может оказаться под руками. Ниже рассматривается вариант изготовления модели, в процессе выполнения слесарно-механических работ над которой потребуется лишь паяльник, напильник, лобзик и дрель.
Все основные элементы, составляющие узлы регулятора хода и рулевой машинки, будут изготавливаться из готовых «полуфабрикатов». Прежде всего, сам автомобиль: очень удобно взять за основу готовую игрушку отечественного или китайского производства, благо в продаже имеется несметное количество моделей.
Желательно выбирать машинку с инерционным двигателем, в этом случае проблема с редуктором привода заднего моста существенно упрощается. Модель выбираемого автомобиля полностью зависит от вкуса конструктора, а вот его размеры должны обеспечить возможность установки на игрушке достаточно емкого аккумулятора.
В нашем случае выберем необслуживаемый герметичный свинцовый аккумулятор китайского производства типа LEOCH DJW12-1,3, напряжением 12 В и емкостью 1,3 А/ч. Такой аккумулятор обеспечит непрерывную работу модели в течение 1,5–2 часов. Срок службы аккумулятора 5 лет. Габаритные размеры 97x43x53 мм, вес — 0,6 кг. Внешний вид приведен на рис. 8.1. Аккумулятор имеет достаточно высокие характеристики и приемлемую стоимость.
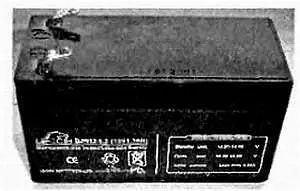
Рис. 8.1. Аккумулятор
Далее для примера рассмотрим модификацию автомобиля, представленного на рис. 8.2. Габаритные размеры модели 280x105x105 мм.
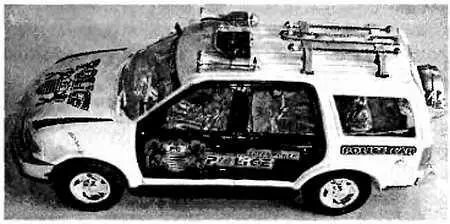
Рис. 8.2. Внешний вид модели
Читать дальшеИнтервал:
Закладка: