В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
HEADFREE*:режим удержания условного направления "вперед" независимо от физического положения рамы. Требует наличия качественного магнетометра, защищенного от помех. В момент активации моторов (включение ARM) контроллер запоминает курс, на который указывает физическое направление "вперед" рамы. Обычно это направление вперед от оператора. При вращении рамы вокруг своей оси во время полета контроллер пересчитывает направление по показаниям магнетометра. Поэтому с точки зрения оператора направления полета "вправо-влево" и "вперед-назад" остаются постоянными, независимо от разворота рамы в воздухе. Считается, что этот режим удобен и безопасен для начинающих операторов, часто теряющих контроль над направлением полета при удалении коптера на достаточное расстояние. Также этот режим предпочитают некоторые операторы при полетах по FPV.
HEADADJ*:режим корректировки направления "вперед" во время работы режима HEADFREE. Если в результате девиаций магнетометра утрачено правильное условное направление "вперед" или его нужно сменить по желанию оператора, или нужно просто полетать в обычном режиме, то можно временно включить HEADADJ. После отключения HEADADJконтроллер запоминает текущее положение "вперед" рамы коптера и дальнейший курс вычисляет уже от него.
CAMSTAB:режим стабилизации двухосевого подвеса камеры. При наклонах рамы контроллер старается стабилизировать положение подвеса. Активируется по каналу AUX, но обычно, при наличии подвеса, этот режим делают включенным постоянно.
CAMTRIG: спуск затвора фотокамеры или запуск/остановка видеозаписи. К специальному выходу TRIG на плате контроллера может быть подключен как электронный адаптер для управления камерой, так и сервомашинка, механически действующая на кнопку спуска камеры.
GPS HOME:режим автоматического возврата "домой" по координатам GPS. При наличии приемника GPS в режиме захвата спутников в момент активации моторов происходит запоминание координат. Затем, при включении режима GPS HOMEкоптер автоматически возвращается к точке старта и зависает на высоте, заданной в настройках прошивки. Эта функция очень полезна в режиме Failsafe и позволяет автоматически вернуть коптер при потере канала управления. При возврате используется компас.
GPS HOLD:режим автоматического удержания позиции по координатам GPS. Для качественного удержания высоты должен быть также включен режим BARO. Если отклонить рукоятку управления от нейтрали, режим удержания временно отключится, и коптер будет реагировать на команды управления. При возврате рукоятки в нейтраль контроллер зафиксирует новую позицию.
Примечание
Режимы GPS HOME и GPS HOLD взаимоисключающие и не должны включаться одновременно.
PASSTHRU:режим сквозного прохождения сигналов радиоуправления с приемника на управляемое устройство. В коптерах не применяется. Может использоваться, например, в самолетах, когда пилот хочет временно отключить стабилизацию и перейти к полностью ручному управлению. При этом стабилизация видеокамеры может продолжать работать.
BEEPER:включение звукового излучателя (beeper, buzzer), подключенного к специальному выходу контроллера. Если в прошивке включено обслуживание звуковых сигналов и активирован режим BEEPER, то контроллер будет реагировать звуком на переключение режимов, а также издавать сигнал "найди меня" при срабатывании функции Failsafe.
LEDMAX:включение подсветки рамы коптера в постоянном режиме. Если используется функция прошивки LED_FLASHER, заставляющая подсветку коптера мигать с заданной частотой, то при активации режима LEDMAXв нее передается максимальное значение OxFF, при котором подсветка горит постоянно. Это необходимо при полетах в ночное время, когда быстро мерцающая подсветка может сильно раздражать зрение.
LEDLOW:принудительное отключение подсветки, когда используется функция прошивки LED_FLASHER. При активации режима LEDLOWв нее передается минимальное значение 0x00, при котором подсветка не горит.
LLIGHTS:включение посадочных огней (Landing Lights) для Подсвечивания посадочной площадки в темное время суток. Посадочные огни также могут включаться автоматически, по показаниям сонара, при достижении заданной высоты. Эта функция включается в настройках прошивки.
CALIB:если в прошивке включена возможность калибровки акселерометра в полете, то по включению режима CALIBво время стабильного горизонтального висения текущее положение запоминается, как нулевое калибровочное положение для акселерометра. В предыдущих версиях прошивки для этого мог использоваться переключатель режима PASSTHRU.
OSD SW:включение/выключение вывода информации OSD в полете, если такая возможность активирована в прошивке. По умолчанию поток данных доступен через последовательный порт всегда.
Эту программу вы скачали в архиве вместе с прошивкой. Для работы приложения потребуется движок Java от Sun Microsystems. Если Java отсутствует на вашем компьютере, при первом запуске вам будет автоматически предложено скачать и установить оболочку Java. Впоследствии Java понадобится и для программы настройки модуля OSD.
Утилита настройки не требует инсталляции. В разархивированной ранее папке выберите нужную версию программы в соответствии с вашей операционной системой. Перед запуском программы контроллер должен быть подключен к компьютеру, иначе нужный СОМ-порт не появится в списке. После запуска выберите нужный порт в списке и нажмите кнопку START. На плате контроллера должны замерцать светодиоды Rx-Tx, а в окне приложения появиться графики потока данных от сенсоров (рис. 5.8).
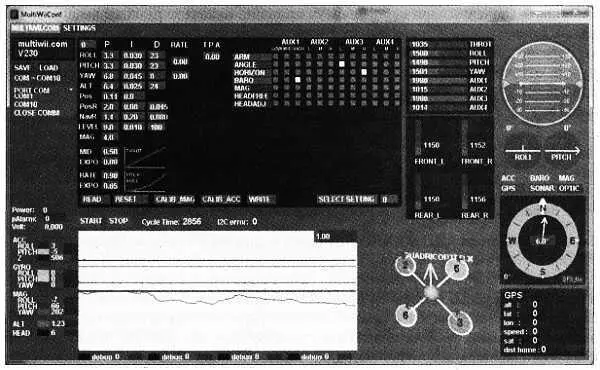
Рис. 5.8. Главное окно интерфейса MultiWiiConf
Калибровка акселерометра
Расположите плату строго горизонтально и нажмите кнопку САLIВ_АСС. Приблизительно в течение 10 с произойдет калибровка акселерометров. В это время плата должна быть неподвижной и не испытывать вибрации. По завершении калибровки светодиоды А и С перестанут мигать непрерывно и будут мигать только при наклоне платы больше 18° от горизонтали, что означает критический нескомпенсированный угол, при котором коптер может начать "соскальзывать", если нет достаточной вертикальной тяги.
Теперь попробуйте наклонять и поворачивать плату. Авиагоризонт и компас в правой части окна должны отображать текущее положение контроллера в пространстве. Расположите плату контроллера стрелкой вперед. При наклоне вправо авиагоризонт должен наклоняться влево, и наоборот. Соответственно, при наклоне вперед уровень горизонта должен подниматься.
Читать дальшеИнтервал:
Закладка:









