В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Установите в конфигураторе значения РID по умолчанию. Соблюдая осторожность, крепко возьмите коптер в руку, поднимите над головой и увеличьте газ до состояния свободного висения. Попробуйте наклонить коптер в любую сторону. Он будет сопротивляться и стремиться вернуться обратно. Быстро отклоните коптер и позвольте ему вернуться в горизонталь. Постепенно увеличивайте значение Р для осей Pitch и Roll до тех пор, пока не почувствуете, что появились затухающие осцилляции (коптер слегка проскакивает равновесие, совершая колебание). Прибавку значения с каждым шагом уменьшайте. После достижения осцилляции уменьшите значение Р на 15–20 %. Повторите эту же процедуру для оси Yaw. На этом базовую настройку Р можно считать законченной. Дальнейшую настройку вы будете выполнять в поле, меняя параметры I и D и проверяя результат в полете.
Настройка I и D для плавного стабильного полета
Исходим из того, что базовая настройка Р уже проведена. Постепенно уменьшайте параметр I до момента, когда почувствуете, что появился неприемлемо сильный дрейф при висении. После этого увеличьте значение примерно на 20 %. Увеличивайте значение D до тех пор, пока не заметите, что стабилизация после резких отклонений стиков не стала неприемлемо слабой. Затем уменьшите D и попробуйте немного уменьшить Р .
Настройка I и D для активного пилотирования и акро
Постепенно уменьшайте параметр I до момента, когда почувствуете, что появился неприемлемо сильный дрейф при висении. После этого увеличьте значение примерно на 5-10 %. Остаточный дрейф не успеет себя проявить при активном пилотировании. Уменьшайте значение D до тех пор, пока стабилизация после резких манипуляций стиками не начнет приводить к опасной раскачке. Затем увеличьте D до исчезновения чрезмерной раскачки. Теперь можно попробовать немного уменьшить Р .
В целом, настройка РID — это субъективный процесс. Его задача — найти ваш личный компромисс между стабильностью коптера и комфортом управления.
Глава 6. Подключение и настройка внешних модулей
Как вы уже знаете, на плате полетного контроллера CRIUS АIOР уже есть встроенный адаптер USB-COM. Но вам все равно придется приобрести дополнительно автономный адаптер. Он неоднократно потребуется для настройки модулей OSD и телеметрии, GPS и Bluetooth. Также при помощи этого адаптера вы сможете менять прошивку большинства модулей OSD.
В продаже доступно большое количество разнообразных адаптеров USB-COM, но все они построены на базе одного из трех чипов: FTDI ( FT232), Prolific ( PL2303) или на ставшем популярным относительно недавно CH340Gпроизводства компании WCH Nanjing QinHeng Electronics. He рекомендуется приобретать адаптеры на основе PL2303, т. к. они не оснащены выходом DTR, который используется для сброса контроллеров Atmel при записи в них прошивки. Вам будет сложно использовать такой адаптер для перепрошивки, например, модулей OSD — придется вручную нажимать кнопку сброса в момент начала записи прошивки. Лучше всего использовать адаптер на основе оригинального чипа FT232, к нему подойдет драйвер, который вы уже установили при первом подключении полетного контроллера к компьютеру. Компания FTDI сейчас ведет борьбу с производителями дешевых китайских клонов микросхемы FT232, поэтому при обнаружении поддельной микросхемы работа драйвера может быть блокирована. Для адаптера на основе CH340G можно скачать драйвер и руководство по установке на сайте http://arduino-project.net/driver-ch340g/.
После того как драйвер адаптера будет успешно установлен, проверим работу адаптера USB-COM в режиме эха. Для этого соедините между собой выводы Тх и Rx адаптера. Теперь адаптер будет передавать данные сам себе и по кольцу возвращать их обратно в программу терминала.
Запустите программу Termite и выберите нужный порт, который появился в системе при подключении адаптера: Settings | Port Configuration | Port. Остальные настройки менять пока не надо, нажмите кнопку ОК. Теперь в нижней строке окна терминала введите любой текст латиницей и нажмите клавишу . Текст должен появиться в окне терминала дважды, как отправленный и принятый. Теперь адаптер и терминал готовы к использованию. Если эхо не работает, проверьте правильность настройки номера порта, появляется ли новый порт в списке устройств компьютера при подключении адаптера, мигают ли на плате адаптера светодиоды приема-передачи при их наличии. При подключении адаптера к другому порту USB ему может быть назначен новый номер порта.
Несмотря на кажущуюся простоту, правильному подключению источника питания к контроллеру CRIUS AIOP v2 следует уделить особое внимание. Иначе вы рискуете столкнуться с непредсказуемым поведением контроллера, зависаниями и сбоями или испортить его.
Примечание
На плате контроллера АIOР версии 2 нет встроенного стабилизатора +5V! Подав на контроллер напряжение 12 В от силовой батареи, вы сожжете как минимум встроенный стабилизатор +3.3V.
Обратимся к схеме разводки цепей питания на рис. 6.1.
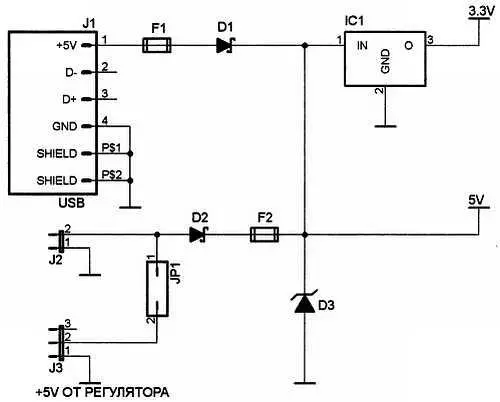
Рис. 6.1. Схема цепей питания полетного контроллера
Подать питание на контроллер можно тремя способами: через разъем USB (J1), с внешнего источника через отдельный разъем питания (J2) и с регулятора оборотов через разъем-гребенку для подключения моторов и сервомашинок (J3).
Стабилитрон D3 и самовосстанавливающиеся предохранители F1, F2 защищают контроллер от переполюсовки. Когда к одному из разъемов приложено напряжение обратной полярности, D3 оказывается включенным в прямом направлении и закорачивает цепь питания, что вызывает срабатывание соответствующего предохранителя. Для полного восстановления, проводимости предохранителя после срабатывания требуется минимум два часа. К сожалению, самовосстанавливающиеся предохранители срабатывают очень медленно, за доли секунды. Стабилитрон D3 открывается тоже не мгновенно. Поэтому вероятность поломки контроллера при переполюсовке весьма велика.
Диоды D1 и D2 развязывают питание от USB и с внешних разъемов между собой.
Питающее напряжение с разъемов J2 и J3 не может попасть на разъем USB через встречно включенный диод D1 и испортить порт компьютера. Но полностью доверять этой защите нельзя. Существует вероятность, что диод D1 будет пробит, в этом случае встречное напряжение будет приложено к порту USB вашего компьютера и может вывести хост-контроллер порта из строя. Поэтому одновременного подключения внешнего питания и порта USB лучше избегать.
Читать дальшеИнтервал:
Закладка:









