В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Рис. 6.6. Ультразвуковой сонар HC-SR04
К сожалению, поддержка сонаров SR04 не реализована в прошивке MultiWii 2.3, поэтому для использования сонара можно воспользоваться прошивкой MahoWii RC3. Для включения сонара раскомментируйте в прошивке строку
//#define SONAR_GENERIC_ECHOPULSE
Далее обратите внимание на строки
#define SONAR_PING 12 // D12 PIN that trigger measure
#define SONAR_READ 11 // D11 PIN to read response pulse
//#define SONAR_PING 9 // D9 PIN that trigger measure
//#define SONAR_READ 10 // D10 PIN to read response pulse
Здесь определяется, к каким выводам платы будет подключаться сонар. В нашем случае вывод сонара TRIG подключается к выводу D12 полетного контроллера, а вывод сонара ECHO — к выводу D11 полетного контроллера. Эти выводы расположены в гребенке для подключения регуляторов оборотов. На эту гребенку также выведено напряжение питания, поэтому сонар можно запитать прямо от этого разъема. Рекомендуется использовать именно эти выводы, т. к. выводы D9 и D10 понадобятся нам для управления подсветкой.
Имейте в виду, что при питании от USB из-за развязывающих диодов D1 и D2 (см. рис. 6.1) напряжение питания не будет поступать на гребенку J3. Чтобы сонар начал работать, питание должно поступать на плату через разъем J2 или от встроенного стабилизатора регулятора оборотов.
В процессе измерения полетный контроллер генерирует пусковой импульс на выводе SONAR_PING и ждет ответный импульс на входе SONAR_READ. Работающий сонар издает едва различимые щелчки с частотой несколько герц.
Наличие сонара может помочь стабилизировать высоту полета на малой высоте 1–3 м, когда барометр работает плохо. Для настройки в прошивке MahoWii предназначены две строки:
#define SONAR_MAX_DISTANCE 300
#define SONAR ERROR MAX 10
Первая строка определяет максимальную высоту в сантиметрах, когда показания сонара еще принимаются во внимание при удержании высоты. Как показывает практика, китайские сонары редко работают на расстоянии более 3 м. Вторая строка определяет максимальное количество ошибок измерения, после превышения которого показания сонара считаются недостоверными и происходит переключение на барометр.
Периодически в продаже встречаются бракованные сонары, страдающие большой погрешностью, либо вовсе неисправные. Поэтому при заказе в Китае желательно приобрести два-три экземпляра и тщательно проверить их работоспособность. Для проверки необходимо, чтобы на сонар поступало питающее напряжение при подключении пр USB. Плюсовой провод питания сонара временно подключите к штырьку "+" платы контроллера, слева от вывода "РРМ". После записи прошивки, в которой включен сонар, он должен начать издавать быстрые щелчки.
Запустите конфигуратор MultiWii WinGUI. В перечне подключенных сенсоров должен появиться сонар. Попробуйте направлять сонар на стены и потолок. В строке ALTинтерфейса должна отображаться текущая дистанция до отражающей поверхности с погрешностью не более 2–3 см. Если значение дистанции периодически непредсказуемо меняется или имеет слишком большую погрешность, сонар лучше заменить.
Светодиоды используются для подсветки рамы коптера либо посадочной площадки при полетах в ночное время. Возможность управления светодиодами предусмотрена в прошивке. Для коммутации светодиодов понадобится изготовить простейший ключ на одном транзисторе, аналогичный ключу для коммутации звукоизлучателя. Но перед тем как начать изготовление коммутатора и подсветки, нам потребуется сделать некоторые расчеты.
Примечание
Светодиод — довольно капризный элемент схемы. Он рассчитан на строго определенный рабочий ток, протекающий через кристалл. Превышение этого тока приводит к перегреву кристалла и его быстрой деградации, что выражается в снижении яркости.
Главным параметром режима светодиода является именно рабочий ток, протекающий через кристалл, а не напряжение питания, подаваемое на схему. Дело в том, что в рабочем режиме падение напряжения на p-n -переходе светодиода почти не меняется при изменении питающего напряжения. Меняется только ток, протекающий через светодиод, и он легко может быть превышен при колебаниях напряжения. Поэтому в светодиодных светильниках используются специальные схемы-драйверы, стабилизирующие ток, а не напряжение. Но для наших целей вполне достаточно использовать ограничивающие ток резисторы, поскольку напряжение питания меняется в небольших пределах.
Падение напряжения на светодиоде зависит от цвета свечения и конкретной марки светодиода. Ориентировочные значения для расчета схем приведены в табл. 6.1.
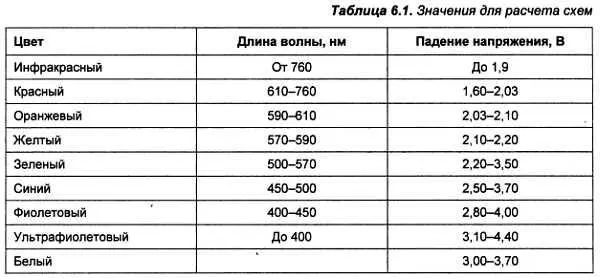
Как следует из табл. 6.1, разброс падений напряжения может быть довольно существенным даже внутри одной цветовой группы, особенно для популярных синих светодиодов. Разброс напряжений между цветовыми группами еще больше. Поэтому если нет возможности получить точные данные из спецификации конкретной марки светодиодов, то лучше измерить падение напряжения самостоятельно, чтобы рассчитать схему наиболее точно и использовать светодиоды более эффективно.
Рабочий ток светодиодов зависит от паспортной мощности, и здесь желательно все же использовать паспортные данные, хотя бы для аналогичных светодиодов. Можно измерить рабочий ток и напряжение ваших светодиодов при помощи простейшей схемы, состоящей из переменного резистора номиналом 680 Ом, миллиамперметра и вольтметра (рис. 6.7).
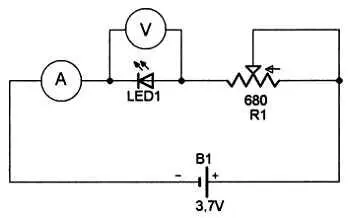
Рис. 6.7. Измерение параметров светодиода
Вместо двух измерительных приборов можно использовать один мультиметр, поочередно включая его в разрыв цепи для контроля тока и параллельно светодиоду для измерения напряжения. Установите движок переменного резистора в положение максимального сопротивления (по нашей схеме — вправо) и подайте питание.
Постепенно уменьшая сопротивление, следите за напряжением на светодиоде. Сначала оно будет нарастать пропорционально углу поворота резистора, а светодиод будет светиться все ярче. Но в какой-то момент напряжение почти перестанет нарастать при уменьшении сопротивления. Это будет означать, что светодиод вошел в рабочий режим. Верните движок переменного резистора на 1–2 градуса обратно.
Напряжение на светодиоде будет соответствовать предельному рабочему напряжению светодиода, а ток в цепи — предельному рабочему току. Для постоянной эксплуатации эти значения желательно уменьшить на 10 %, чтобы продлить срок службы светодиодов.
Для обычных массовых светодиодов с линзой диаметром 5 мм и белым или синим цветом свечения рабочим напряжением принято считать 3 В, а рабочий ток — порядка 12–15 мА. Для красных светодиодов аналогичной мощности рабочим напряжением считается 2 В при том же токе. Таким образом, номинал токоограничительного резистора в цепи будет зависеть от цвета применяемых светодиодов.
Читать дальшеИнтервал:
Закладка:









