В. Яценко - Твой первый квадрокоптер: теория и практика

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Жанр:
- Издательство:БХВ-Петербург
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
В. Яценко - Твой первый квадрокоптер: теория и практика краткое содержание
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Примечание
К сожалению, на диодах D1 и D2 падает питающее напряжение. Самовосстанавливающийся предохранитель также обладает сопротивлением 1,5–2 Ом. По измерениям автора, выполненным на разных платах, суммарное падение напряжения на диоде и предохранителе под рабочей нагрузкой составляет 0,33-0,35 В. И если подать на контроллер напряжение 5,00 В, то фактически контроллер будет питаться напряжением 4,65 В. При таком напряжении плата контроллера работает неустойчиво и склонна к непредсказуемым сбоям прямо в процессе полета. Поэтому напряжение источника питания должно лежать в пределах 5,2–5,6 В.
Для питания контроллера можно использовать преобразователь напряжения "step-down" с подстройкой или подобрать номинал постоянных резисторов на плате преобразователя. В специализированных источниках питания для коптеров обычно уже выставлено напряжение с нужным запасом. Если вы хотите использовать простейший линейный стабилизатор на микросхеме 78L05 или аналогичной, то включите в разрыв ее "земляного" вывода один-два маломощных кремниевых диода в прямом направлении, как показано на схеме рис. 6.2.
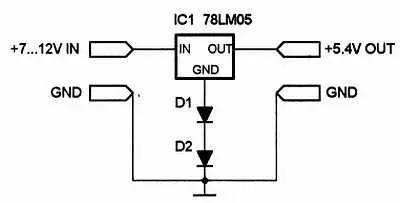
Рис. 6.2. Увеличение выходного напряжения линейного стабилизатора
Если ваш контроллер при питании от порта USB нестабильно работает, выдает странные показания датчиков в программу конфигурации или зависает, то можно попробовать закоротить перемычкой из тонкого провода диод D1, как показано на рис. 6.3. Это следует делать, только если вы четко понимаете, что и зачем делаете, и имеете достаточный опыт пайки миниатюрных SMD-компонентов! После такой переделки порт вашего компьютера останется без защиты от случайной подачи встречного напряжения с регуляторов или через разъем внешнего питания J2. Нужно будет особенно тщательно следить за тем, чтобы случайно не подключить одновременно питание от батареи и порт USB.
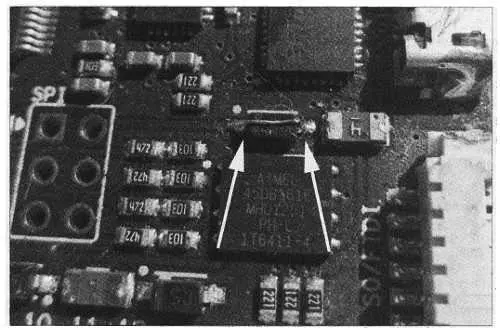
Рис. 6.3. Закорачивание развязывающего диода D1 в цепи питания от порта USB
Звукоизлучатели (beeper, buzzler) могут быть пассивными либо активными. Активные звукоизлучатели содержат собственно пассивный звукоизлучающий элемент и встроенный генератор звуковой частоты, который начинает работать при подаче питающего напряжения либо разрешающего логического уровня на управляющий вход. В авиамоделизме чаще всего применяются малогабаритные магнитодинамические излучатели, состоящие из мощного редкоземельного магнита, катушки и металлической мембранки. Иногда встречаются пьезоэлектрические звукоизлучатели, но обычно они менее эффективны: имеют меньшую громкость и требуют для работы большего напряжения, поэтому используются реже.
Примечание
Пассивные звукоизлучатели категорически запрещается подключать напрямую к выходу микроконтроллера, т. к. это может привести к перегрузке выхода по току и выходу контроллера из строя.
Оптимальным решением является использование готового активного звукоизлучателя, например, такого, как на рис. 3.15. Они стоят очень недорого, содержат встроенный генератор и транзисторный ключ, вход для управления логическим уровнем контроллера.
Имейте в виду, что звукоизлучатели разных типов могут иметь одинаковый корпус, поэтому однозначно отличить активный излучатель от пассивного можно не всегда. Кроме того, вам могут встретиться активные излучатели, рассчитанные на 12 В.
Прежде, чем подключать излучатель к контроллеру, подайте на его выводы питающее напряжение +5 В. Если он будет издавать звук достаточной громкости с частотой 1000 Гц, то все в порядке. Иначе придется искать другой бипер или делать простейшую схему звукового генератора. Контроллер генерирует только управляющий сигнал "вкл/выкл".
Простейший ключ для управления бипером можно сделать на основе биполярного или полевого транзистора, как показано на схеме рис. 6.4.
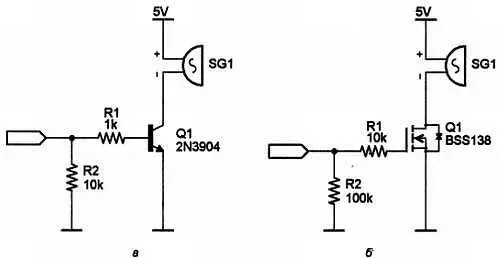
Рис. 6.4. Ключ на биполярном ( а) и полевом ( б) транзисторе
Подойдет любой маломощный биполярный n-p-n -транзистор или полевой N -канальный, затвор которого управляется логическими уровнями. Такие транзисторы еще называют "цифровыми".
Для активации функции бипера надо раскомментировать строку
#define BUZZER
После этого в интерфейсе конфигуратора появится опция BEEPERи можно будет назначить включение звукового сигнала на один из переключателей AUX. Если хотите, чтобы коптер коротким звуковым сигналом реагировал на изменение режимов, раскомментируйте строку
#define RCOPTIONSBEEP
По умолчанию вход бипера подключается к цифровому выходу D32 на плате контроллера. К сожалению, во второй версии платы Crius AIOP это не штыревой разъем, а контактная площадка на плате (рис. 6.5).
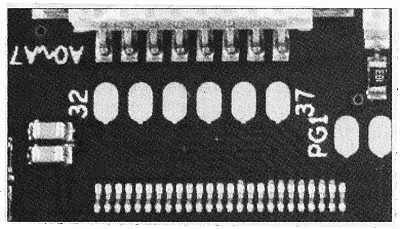
Рис. 6.5. Дополнительные цифровые выходы (D32-D37) контроллера
Рядом расположены площадки нескольких других дополнительных выводов. Крайне неудобное и опасное решение: эти площадки отслаиваются после перегрева при пайке, их можно легко оторвать, неосторожно дернув за провод. Эстетизма конструкции и удобства при эксплуатации торчащие из платы провода тоже не добавляют.
Поэтому желательно перенести выход бипера на один из свободных цифровых выходов, снабженных штыревым разъемом. Например, если вы не планируете использовать выход D46 для управления затвором фотокамеры, то для переноса выхода бипера на вывод D46 найдите в прошивке строки
//#define OVERRIDE_BUZZERPIN_PINMODE pinMode (A2, OUTPUT);
//#define OVERRIDE_BUZZERPIN_ON PORTC |= 1<<2;
//#define OVERRIDE_BUZZERPIN_OFF PORTC &= ~(1<<2);
Раскомментируйте их и замените аргументы определений следующими значениями:
#define OVERRIDE_BUZZERPIN_PINMODE pinMode ( 46, OUTPUT);
#define OVERRIDE_BUZZERPIN_ON PORTL|= 1<< 3;
#define OVERRIDE_BUZZERPIN_OFF PORTL&= ~(1<< 3);
Подключать бипер к выводу D46 удобно, т. к. в штатном режиме на гребенке разъема присутствует питающее напряжение +5 В и бипер можно подключить стандартным трехжильным проводом от сервомашинки.
Ультразвуковой сонар хорошо подходит для автоматического включения посадочных огней (фонарей подсветки посадочной площадки) в темное время суток, поскольку огни нужно включать на высоте менее 3 м. Это именно та дистанция, на которой обычный модуль сонара начинает достаточно точно и стабильно работать. Такой способ управлять включением огней не является расточительным, т. к. модули сонаров HC-SR04 (рис. 6.6) стоят в Китае менее двухсот рублей. Эти сонары используются во множестве любительских проектов и продаются, как аксессуар для Arduino.
Читать дальшеИнтервал:
Закладка:









