Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника

- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Жанр:
- Издательство:СОЛОН-Пресс
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника краткое содержание
Книга состоит из описаний простых конструкций, содержащих электронные компоненты. Тематика изделий — электронные игрушки и сувениры.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Итак, обобщим: механика многих игрушек может содержать редуктор. В его состав входит корпус-основание, колёса, передающие вращение, валы и оси.
Первым условием выбора, конечно, является передаточное число (отношение) редуктора. Его можно определить как отношение числа оборотов ведущего колеса или входного вала к числу оборотов выходного вала или колеса за одно и то же время. Иными словами — это дробь, в числителе которой частота вращения вала мотора игрушки, в знаменателе — частота вращения конечной (выходной) шестерни редуктора (вала на которой она закреплена). Чем больше эта величина, тем медленнее движения исполнительного механизма, но больше его усилие. Говоря совершенно просто, паровозик поедет медленно, но потянет за собой много вагонов. Так, если мы имеем мотор с номинальной частотой вращения 1200 оборотов в минуту, а хотим чтобы колесо робота совершало 60 оборотов в минуту, значит, нам понадобится редуктор с отношением, равным 200.
Как его оценить в готовом редукторе? Самый простой и оправданный способ, особенно если «внутренности» редуктора недоступны глазу, поступить так: поставить риски-метки на входной и выходной валы или передаточные колёса; прокручивая входной вал подсчитать число его оборотов до того момента пока выходной вал не сделает полный оборот. Подсчитанное число и есть передаточное.
А как быть, если метки ставить неудобно или редуктор не прокручивается или нужны точные данные? Здесь придётся проникать в его «недра» и проводить теоретические вычисления. Вновь вернёмся к редуктору — взглянем на рис. 6.
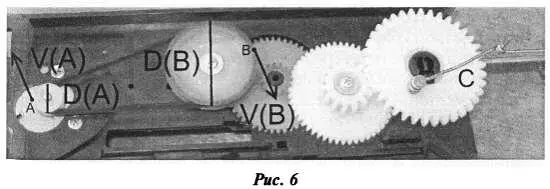
Нетрудно сообразить, что любая крайняя точка колёс любой взаимодействующей пары движется с одинаковой по модулю линейной скоростью (V(A) = V(B)). В противном случае колёса проскальзывали бы друг относительно друга, чего в исправном редукторе не бывает. Пока точка В совершит один оборот точка А сделает примерно три, ведь пути точек из-за равенства скоростей одинаковые и длина обода шкива А в три раза меньше длины обода шкива В . Такое же соотношение имеют диаметры пар колёс. Вывод: во сколько раз диаметр одного взаимодействующего колеса, больше диаметра другого, во столько раз меньше частота его вращения по сравнению с частотой вращения другого. То есть первая пара (рис. 5) понижает частоту вращения втрое, вторая грубо тоже втрое, третья и четвёртая так же. В итоге редуктор снижает частоту вращения шестерни С (рис. 6) в 81 (перемножение получившихся отношений) раз по сравнению с частотой вращения вала (шкив А ) мотора. Более точно передаточное число находится при измерении диаметров шестерён и шкивов (колёс) штангельциркулем и вычислении на калькуляторе их отношений.
Вторым условием выбора редуктора можно считать условие количества передаточных пар, величины передаваемою крутящего момента. В конечном итоге речь идёт о массогабаритах редуктора, материалах его изготовления, потерях электроэнергии на поддержание вращения всех его элементов во время передачи вращения.
В игрушечном конструировании оптимальным, по мнению автора, является редуктор с габаритным объёмом в границах от 8 до 125 кубических сантиметров с числом передаточных пар 1–4. Материал корпуса и элементов — пластмасса. Колёса, передающие вращение в основном шестерни, допустимы шкивы. Например, по рисунку 6 редуктор состоит из следующей передающей движение цепочки: шкив на шкив-шестерню; на двойную шестерню; на двойную шестерню; на шестерню с кривошипом и шатуном.
Почему такой выбор? Попробую объяснить «методом от противного». Итак, недостатки фрикционной передачи (рис. 1): проскальзывание, ведущее к непостоянству передаточного числа и потери энергии; необходимость обеспечения прижима, что резко снижает КПД редуктора и, в конечном счете, делает его ненадёжным. Избавится от этих недостатков можно, делая прижим «пружинистым», например как в ходовой части Маавта ( Мамичев Д. Игра «Выживание Маавта»// РАДИО 2010; № 10; с.51), но такой вариант существенно усложняет конструкцию редуктора. Ременная передача (рис. 2) так же имеет недостатки, а именно: провисание ремня (резинового пассика), его разрушение со временем, особенно при воздействии низких температур, проскальзывание при вращении. Металлические шестерни и шкивы надёжнее и долговечнее пластмассовых изделий, но их сложнее найти и дороже приобрести. Редуктор из них тяжелее.
Третье условие выбора это, собственно говоря, порядок его обретения. Редуктор можно сделать самому, а можно купить. Сегодня интернет магазины предлагают широкий ассортимент готовых мотор-редукторов (рис. 7).

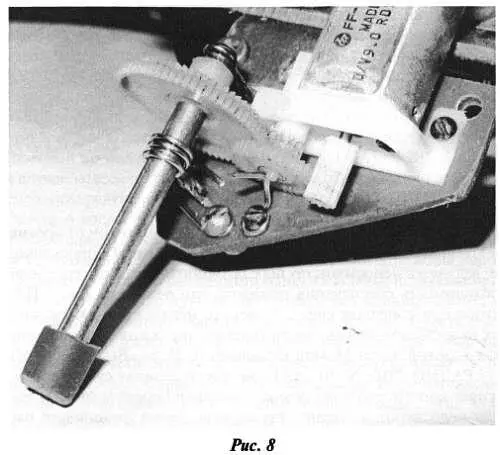
Однако далеко не всегда имеющийся редуктор подходит под задуманную поделку. В такой ситуации приемлемо изготовить редуктор самому (рис. 8), используя отдельные элементы и части кинематических схем изделий промышленного производства.
Такими «донорами» могут быть старая РЭА, неисправная офисная и бытовая техника, поломанные детские игрушки с «электронной начинкой». Компактные редукторы можно найти в автомобильных CD-приводах, фотоаппаратах «мыльницах». Много шестерёнок, валов и осей можно извлечь из неисправных DVD — приводов компьютеров, принтеров, импортных кассетных магнитофонов, видеомагнитофонов. Готовые редукторы имеются в детских машинках на радиоуправлении и просто электрифицированных с мотором. Механика старых «кварцевых часов» и «ходиков» содержит много полезных вещей, часто реализованных в металле.
Итак, обобщим: при использовании редуктора желательно знать его передаточное число, возможно, его самостоятельное изготовление из элементов кинематики различной аппаратуры и техники.
В игрушечной электронике приемлемо использование достаточно большого ассортимента двигателей постоянного тока (рис. 9).
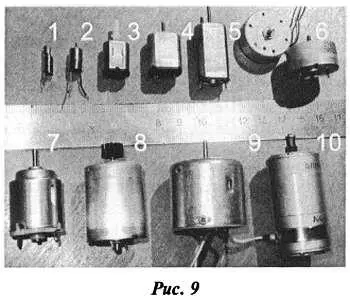
Начиная с моторчиков виброзвонков сотовых телефонов ( 1 и 2 ), двигателей компьютерных приводов, автомобильных проигрывателей дисков ( 3, 4, 5, 6 ) и заканчивая «китайскими моторами» от игрушек ( 7 ).
«Тяжеловесами» для относительно крупных поделок могут стать двигатели из кинематики принтеров ( 8 ), старых кассетных магнитофонов ( 9 ) и наконец, отечественная гордость — двигатели серии ДПМ ( 10 ). Что касается рабочих напряжений и потребляемых токов многое зависит от конкретного применения в конструкции. Так большинство двигателей типоразмера 1 и 2 «живут в игрушках, не греясь» при подаваемых напряжениях 1,5-3В и потребляемых токах 20-100 мА.
Читать дальшеИнтервал:
Закладка: