Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника

- Название:Простые роботы своими руками или несерьёзная электроника
- Автор:
- Жанр:
- Издательство:СОЛОН-Пресс
- Год:2016
- Город:Москва
- ISBN:978-5-91359-185-2
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Дмитрий Мамичев - Простые роботы своими руками или несерьёзная электроника краткое содержание
Книга состоит из описаний простых конструкций, содержащих электронные компоненты. Тематика изделий — электронные игрушки и сувениры.
Содержание книги является логическим продолжением содержания двух первых книг — «Роботы своими руками. Игрушечная электроника» и «Игрушечная электроника NEXT», опубликованных в издательстве СОЛОН-ПРЕСС.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий.
Простые роботы своими руками или несерьёзная электроника - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Моторы группы 3–6 функционируют в диапазоне 3–6 В (некоторые рассчитаны на 9 вольт) и потребляемых токах, в зависимости от механической нагрузки, в 30-150 мА. Электродвигатели типа 7 лучше не использовать — при напряжении в 3–4 В они потребляют токи в 150–300 мА даже на холостом ходу. По этой же причине сегодня не находят должного применения «советские игрушечные моторы» (рис. 10).
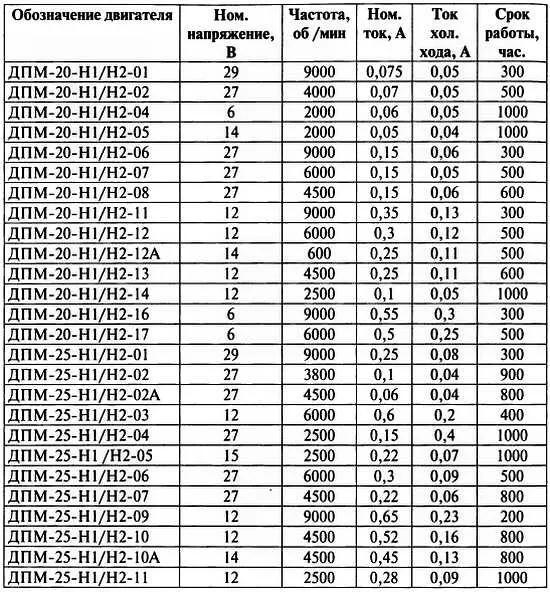
Двигатели 8-10 в основном рассчитаны на напряжение питания 9-12 вольт и выше. Данные на дорогие и качественные двигатели ДПМ с диаметром корпуса 20 и 25 мм сведены в таблицу (исходные данные позаимствованы из книги В.А. Днищенко «Дистанционное управление моделями», изд. НиТ, 2007 г.).
Конечно, при выборе двигателя под изделие можно полагаться на сугубо теоретические расчёты, но в нашем несерьёзном занятии проще обходится экспериментальными испытаниями двигателей. Итак, попробуем сформулировать основные этапы подбора двигателя под конструкцию.
1. Оценка линейных размеров будущего изделия и массо-габаритов источника питания. (Именно он довольно часто определяет вид будущего мотора игрушки). Так для элементов типа LR44 подойдут двигатели 1, 2 . Разумный размер поделки, если она вмещается в куб с ребром 5–6 см. Для двигателей 3, 4 удобнее использовать элементы типа ААА («мизинчиковые батарейки»), сама конструкция может размещаться в кубе с ребром до 10–12 см.
Самые ходовые моторы 5, 6 «созданы» для «солевых батареек» типа АА. Двигатели 8-10 для «алкалиновых элементов», аккумуляторов и прочих более «тяжелых калибров солевых батареек». Кубик-гараж для таких поделок может иметь длину ребра от 15 см и выше.
2. Выбор конкретных моторов по массо — размерам.
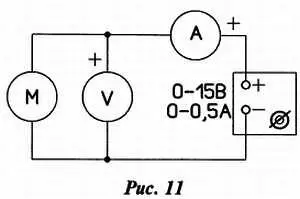
3. Выбор наилучшего варианта из имеющихся вариантов. Для испытаний двигателя понадобится источник постоянного тока с регулировкой напряжения от 0 до 12–15 В. Желательно, чтобы источник мог обеспечить ток в нагрузке до 0,5 ампера. Совсем здорово если в блоке питания будет встроенный вольтметр и амперметр. Если их нет не беда, можно собрать простую электрическую цепь (рис. 11). Вольтметр и амперметр так же должны быть рассчитаны на измерение напряжения и силы тока в указанных пределах.
Итак, плавно увеличивая напряжение на контактных лепестках мотора, фиксируем значение силы тока, и напряжения при котором его ротор придёт в постоянное вращение (чем ниже ток, тем «приятнее мотор»). Слегка увеличим напряжение, приложим указательный палец к валу мотора и постепенно начнём надавливать, одновременно увеличивая напряжение. Вновь заметим показания приборов, при которых ток увеличился в 2–3 раза по сравнению с первым фиксированным значением. Подержим вал под пальцем около минуты. Если корпус двигателя слегка нагрелся (кожа ощущает тепло) значит, такой режим работы двигателя приемлем. При этом фиксируем значение питающего напряжения, силы тока, а «на палец запоминаем» крутящий момент и частоту вращения вала при нагрузке. Повторяем «процедуру» для всех экземпляров моторов. Делаем свой выбор по принципу: «Побеждает самый упорный и менее прожорливый!».
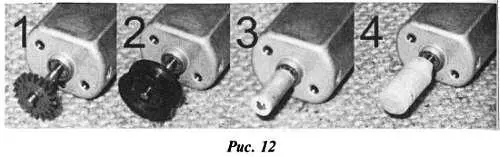
4. Далее следует определиться с входным колесом будущего редуктора (рис. 12). Это может быть шестерёнка 1 , шкив 2 , резиновый валик 3 , червяк 4 . Диаметры валов моторов составляют ряд 0,7 мм, 1 мм, 1,5 мм, 2 мм. Колесо должно плотно, с усилием надеваться на вал. Проще всего подобрать вариант 3 , сложнее всего вариант 4 .
Итак, обобщим: Если двигатель выбран верно, то значение величины тока, потребляемого двигателями самоделок, должно находиться в пределах 50-150 мА, при напряжении источника 3–9 вольт.
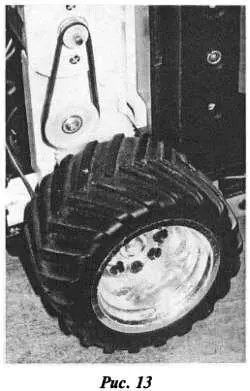
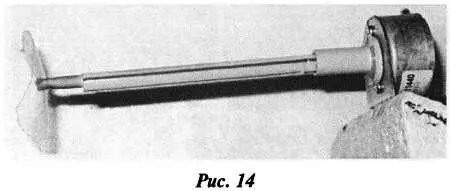
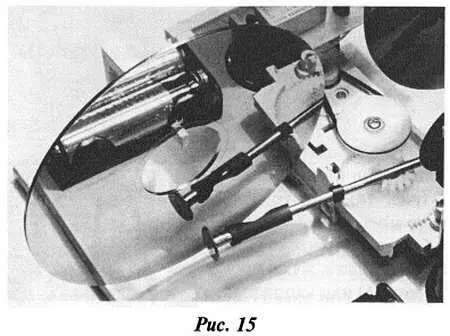
В игрушках их может быть много, и они могут быть разные. Например, колесо мобильного робота (рис. 13) или гребной винт на валопроводе (рис. 14), или устройство ударного молоточка (рис. 15).
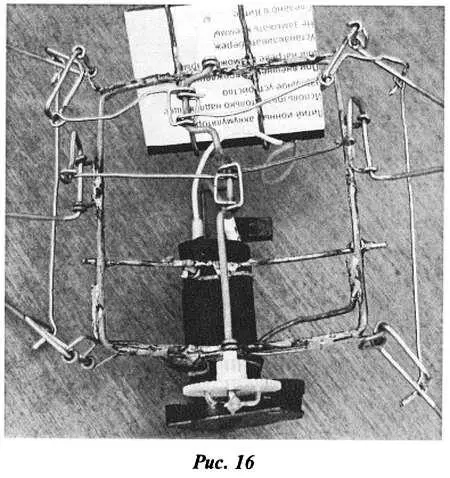
Это может быть довольно сложная система ходовой части жука-проволочника (рис. 16) или капризная в настройке колебательная система маятника (рис. 17).
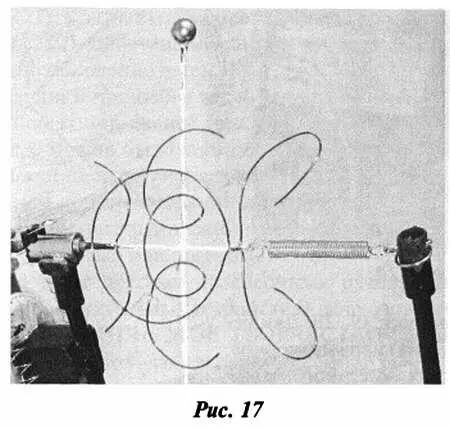
Но в любом случае они обеспечивают движение и взаимодействие изделия (его частей) с окружающей средой (полигоном), их основная задача преобразовать вращательное движение выходного вала (колеса) редуктора или двигателя в «нужное» движение изделия или (и) его частей.
Рассмотрим пару самых «ходовых» механизмов. Итак, кривошипно-шатунный механизм (рис. 18) предназначен для преобразования вращательного (точка А ) движения в возвратно-поступательное движение (точка В ). Механизм является обратимым, следовательно, может преобразовывать возвратно — поступательное движение в движение по окружности.
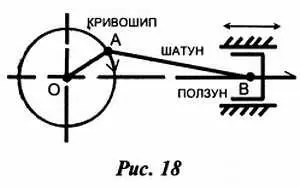
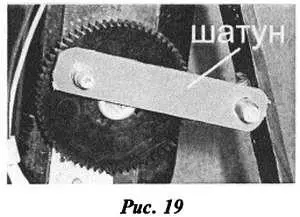
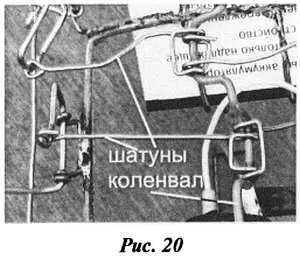
К основным элементам механизма относятся: кривошип, шатун и ползун. Они связаны друг с другом парой шарниров. Если нужно «организовать» на одном валу несколько взаимосвязанных механизмов, прибегают к использованию коленвала. Принцип действия механизма, конечно, не меняется. Наглядно представить работу механизма позволяют рисунки 19, 20.
Движение его ползуна неравномерное. В окрестностях «мёртвого хода» ползун движется с наименьшими скоростями.
Шарнирно-рычажные механизмы. Они предназначены для смены направления движения одной части механизма относительно другой части. Кроме этого данные механизмы призваны менять длину хода рабочего рычага, увеличивая или уменьшая её. К их основным составным элементам относятся рычаги (звенья) и шарниры. Длина хода в этих механизмах увеличивается за счёт увеличения длины плеча рычага. Один из самых распространённых механизмов это четырёхзвенник (рис. 21). Каждый, наверное, по детству помнит лягушку-попрыгушку (рис. 22). Действие механизма этой игрушки приводило в восторг не одно поколение детей.
Читать дальшеИнтервал:
Закладка: