Сергей Макаренко - Противодействие беспилотным летательным аппаратам

- Название:Противодействие беспилотным летательным аппаратам
- Автор:
- Жанр:
- Издательство:Издательство «Наукоемкие технологии» OOO «Корпорация «Интел Групп»
- Год:2020
- Город:Санкт-Петербург
- ISBN:978-5-6044793-6-0
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Сергей Макаренко - Противодействие беспилотным летательным аппаратам краткое содержание
Материалы работы предназначены для научных сотрудников, соискателей ученых степеней, военных и технических специалистов, занимающихся вопросами противодействия БПЛА.
Отдельные результаты, представленные в данной монографии, получены в рамках госбюджетной темы НИР СПИИРАН № 0073-2019-0004.
Противодействие беспилотным летательным аппаратам - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Как правило, двигательная установка малых БПЛА самолетного типа, представляет собой турбовинтовой двигатель, который в общих принципах соответствует двигательная установке пилотируемых ЛА [33].
Вместе с тем, в последнее время в качестве БПЛА получили широкое распространение малые БПЛА вертолетного типа, так называемые «мультикоптеры», «квадрокоптеры», «дроны». Для данных БПЛА характерно использование установки принципиально иного рода — на основе использования 4, 6 или большего количества двигателей.
В качестве двигателей малых БПЛА вертолетного типа применяют двигатели двух типов [34]:
— коллекторные — обмотки находятся на роторе (вращающейся части);
— бесколлекторные — обмотки находятся на статоре (неподвижной части).
Бесколлекторные двигатели (BLDC-двигатели) не используют щеток и коллекторов и при наличии хороших подшипников требуют минимального технического обслуживания. Ротор BLDC-двигателей изготавливается из постоянного магнита и не имеет обмоток. Статор содержит обмотки, переменное поле которых приводит к вращению ротора [35].
Управление двигателями осуществляется с помощью задания направления и скорости вращения винтов через подключаемые к ним электронные регуляторы скорости ESC (Electric Speed Controller). На вход ррегуляторов подается напряжение с аккумулятора и управляющие сигналы с микроконтроллера, на выход регулятор отдает напряжение для привода [36].
Увеличением числа оборотов винтов в единицу времени задается подъем, уменьшением — опускание. Увеличение оборотов двух боковых винтов задает крен, а передних или задних — тангаж с последующим движением в сторону или подъемом/снижением по косой соответственно, а винтов, расположенных на одной из косых осей, — разворот аппарата влево или вправо (рыскание). Для стабилизации движения одна пара винтов всегда вращается по часовой стрелке, другая — против (рис. 1.7), компенсируя этим крутящий момент [37].
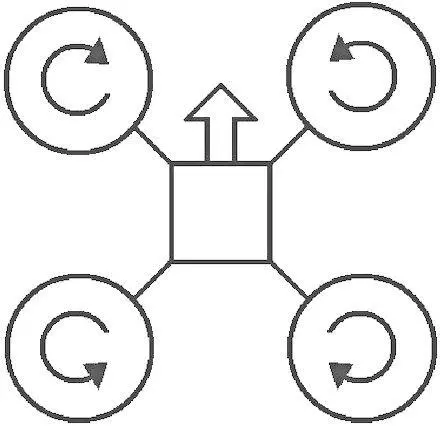
Рис. 1.7. Вращение винтов малых БПЛА вертолетного типа [38]
1.5.2. Система управления
По способам управления БПЛА декомпозируют на:
— автономные;
— полуавтономные;
— управляемые.
Выбор способа управления зависит от сложности и специфики выполнения, поставленных перед БПЛА задач. Как правило, система управления больших БПЛА самолетного типа в общих принципах соответствует пилотируемым ЛА [39], а малые БПЛА имеют иерархическую трехуровневую компоновку системы управления [40]:
1) нижний уровень — уровень отдельных устройств, механизмов, датчиков и оборудования;
2) средний уровень — уровень управления процессами полета с помощью бортовых контроллеров, модулей ввода-вывода сигналов и коммутационного оборудования;
3) верхний уровень — уровень диспетчеризации и администрирования БПЛА, осуществляющий взаимодействие между оператором или программой полета через интерфейс с контроллерами среднего уровня.
1. Нижний уровень управления образуется, двигательной установкой, датчиками навигационной системы (подробно рассмотрены далее), оборудованием полезной нагрузки: оптико-электронные средства (ОЭС), радиолокационные станции (РЛС), различные другие радиоэлектронные средства (РЭС) и т. д. [41].
2. Средний уровень соответствует бортовым аппаратно-программным средствам управления. Бортовая система управления малыми БПЛА формируется на базе бортовых цифровых вычислительных машин (БЦВМ), которые, как правило, управляются либо открытыми операционными системами (ОС), такими как Linux, Android и т. д., либо специализированными ОС реального времени, такими как QNX, VME, VxWorks, XOberon и т. д. Кроме того, в последнее время появились различные проекты по созданию ОС и прикладного программного обеспечения (ПО) специально ориентированного на БПЛА.
В настоящее время получили широкое распространение схемотехнические решения, в которых БЦВМ, а также основные контролеры устройств вы- полнены на единой плате и упакованы в защитный корпус. При этом БЦВМ, представляет собой RISC микропроцессор, как правило, ARM архитектуры, а отдельные контролеры — микросхемы ПЛИС, которые могут быть запрограммированы с учетом особенностей функционирования конкретных образцов бортового РЭО [42]. Пример БЦВМ малого БПЛА на ПЛИС представлен на рис. 1.8.
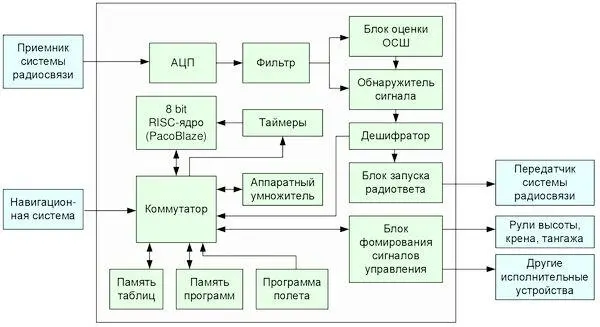
Рис. 1.8. БЦВМ малого БПЛА на основе ПЛИС фирмы Xilinx серии Spartan2 XC2S100 [43]
В качестве аппаратуры управления в малых БПЛА могут применяться цифровые сигнальные процессоры или микроконтроллеры (MicroPC), программируемые на языках высокого уровня, таких как С, С++, Модула-2, Оберон SA или Ада95, а также программные пакеты SCADA (Supervisory Control And Data Acquisition) — диспетчерское управление и сбор данных), предназначенные для разработки или обеспечения работы в реальном времени систем мониторинга или управления [44]. Кроме того, для управления малыми БПЛА могут использоваться специальные полетные контроллеры FCU (Flight Control Unit), которые формируют команды для микроконтроллеров управляющих двигателями и отдельными подсистемами БПЛА, в соответствии с данными, получаемыми по командной радиолинии управления (КРУ).
В последнее время три ведущих производителя микроэлектроники Qualcomm, Intel и Nvidia выпустили собственные типовые схемотехнические решения для систем управления БПЛА. Кроме того, аналогичное решение выпустил один из ведущих китайских производителей микроэлектроники — Leadcore. Каждый набор является типовым решением, включающем в себя [45]:
— центральный процессор управления CPU (Central Processing Unit);
— бортовую ОЭС;
— графический процессор GPU (Graphics Processing Unit) обработки видеоданных, поступающих от бортовой ОЭС;
— систему связи на основе технологии Wi-Fi.
Характеристики этих схемотехнических решений приведены в таблице 1.5.
Таблица 1.5 — Характеристики типовых технических решений для БПЛА от компаний Qualcomm, Intel, Nvidia и Leadcore [46]
| Производитель / тех. решение | Qualcomm Snapdragon Flight | Intel Edison for Arduino | Nvidia Jetson TX1 | Leadcore LC1860 |
| CPU | 4×Qualcomm Krait 400 | 22 нм dual-core Intel Atom | 64-bit ARM A57 core | 6-core Cortex A7 |
| Частота CPU | 2,5 ГГц | 500 МГц | 2 ГГц | 2 ГГц |
| GPU | Qualcomm Adreno 330 | Intel HD Graphic | Maxwell architecture, 256 CUDA cores | Dual-core Mali T628 |
| Производительность GPU | 167 GFLOPs | н/д | 1 TeraFLOPs | н/д |
| Потребление энергии | н/д | 35 мВт в статике | менее 10 Вт | н/д |
| Система связи Wi-Fi и Bluetooth | Да | Да | Да | Да |
| Бинокулярное стерео зрение | Да | Внешние датчики | Да | Да |
| Разрешающая способность камеры | 4096×2160 | не менее 1280×720 | 4096×2160 | 2048×1080 |
| Размер | 58 мм × 40 мм | 127 мм × 72 мм | 87 мм × 50 мм | 41 мм × 61,5 мм |
| Преимущества | Сбалансированное решение по критерию «производительность / стоимость» | Сопряжение с внешними датчиками; Высокая точность и широкий диапазон применения | Высокая производительность в многопоточных задачах | Низкая цена |
| Недостатки | Относительно узкий диапазон применения | Высокое энергопотребление и цена | Высокое энергопотребление и цена | Относительно низкая производительность |
| Преимущества для применения на БПЛА | Энергоэффективное решение для управления БПЛА; поддержка групп БПЛА | Высокая производительность | Решения для управления БПЛА с использованием технологий машинного зрения и ИИ | Сбалансированное решение по критерию «эффективность / стоимость» |
н/д — нет данных.
Читать дальшеИнтервал:
Закладка: