Авиация и космонавтика 2002 10

- Название:Авиация и космонавтика 2002 10
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2002
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Авиация и космонавтика 2002 10 краткое содержание
Авиация и космонавтика 2002 10 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
К началу семидесятых годов как в США, так и в СССР осуществлялись программы создания истребителей четвертого поколения.
На этапе выпуска аванпроекта по будущему МиГ-29 в качестве основного вооружения перспективных истребителей рассматривались находившиеся на завершающем этапе разработки ракеты, предназначенные для самолетов третьего поколения – Р-60, Р-23, и копия американской "Сперроу" – отечественная К-25. Однако уже к середине семидесятых с достаточной определенностью назрела необходимость создания вооружения, по боевым возможностям опережающего американские образцы, а не копирующего их с более чем десятилетним отставанием.
С началом в 1974 г. опытно-конструкторских работ по будущим МиГ-29 и Су-27 на "Вымпеле" и в ПКПК разработали аванпроекты ракет К-27. По итогам их конкурсного рассмотрения дальнейшую работу поручили коллективу "Вымпела" во главе с АЛ. Ляпиным. Разработка осуществлялась под руководством П.П. Дементьева и В.Т. Корсакова
Перспектива одновременной разработки двух истребителей практически одинакового назначения подсказала принципиальное решение в реализации концепции создания системы из двух унифицированных ракет – К-27А для легкого МиГ-29 и К-27Б для Су-27. Предполагалось, что эти ракеты будут отличаться только двигательными установками и, соответственно, дальностью пусков. Исходя из сложившейся практики, сочли целесообразным предусмотреть для каждой модификации ракеты с различными двигательными установками варианты исполнения с "радийной" и "тепловой" ГСН. Так определилась концепция "модульной" ракеты с варьируемыми ГСН и двигательными установками и унифицированной центральной частью.
Однако реализация столь заманчивой схемы унификации потребовала изыскания специальных мер для сближения аэродинамических характеристик вариантов ракет с существенным отличием геометрии, почти полуторакратной разницей по массе и еще большей по моментам инерции.
Эффективность одного из этих мероприятий, а именно применения дестабилизаторов разной площади для компенсации различий аэродинамических характеристик вариантов ракет уже была убедительно подтверждена на тепловых и "радийных" модификациях ракет семейства Р-23/Р-24.
Представлялось очень заманчивым добиться взаимозаменяемости двигательных установок, исключив кабельные и газовые связи расположенных в центральном блоке аппаратуры управления и газогенератора с хвостовой частью ракеты. Однако принятая схема "утка" традиционно связывалась с необходимостью размещения в хвостовой части рулевых машин привода управления элеронами. Дело в том, что при свойственном данной схеме переднем расположении рулей их отклонение порождает скос воздушного потока. Он воздействует на установленные в хвосте крылья таким образом, что при определенном сочетании величин отклонения рулей с углами атаки и скольжения возникает явление так называемого "реверса управления по крену". Момент от аэродинамических сил на крыльях действует в направлении, противоположном моменту от сил на рулях, и превышает его. Поэтому практически на всех ракетах, выполненных по схеме "утка", рули служат только для управления по тангажу и рысканью, а по каналу крена используются либо обеспечивающие стабилизацию элероны, либо роллероны, ограничивающие скорость вращения ракеты по крену.
Однако конструкторам "Вымпела" удалось разорвать этот "порочный круг" и обеспечить управление ракетой по всем каналам дифференцированным отклонением рулей, отказавшись от элеронов. Для этого применили рули уникальной формы – "бабочка", с отрицательным сужением – с хордой в корне почти вдвое меньшей, чем у законцовок, с отрицательным углом стреловидности по передней кромке и положительным – у задней. В результате область наиболее возмущенного рулями воздушного потока воздуха оказалась отнесена от корпуса ракеты и оказывала минимальное воздействие на крылья малого удлинения, размах которых был принят в полтора раза меньшим, чем у рулей.
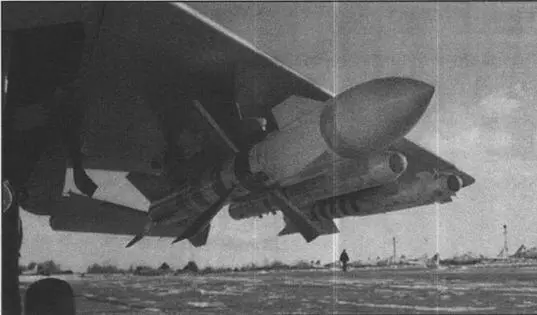
Ракета Р-27Р на внутреннем пилоне истребителя МиГ-29

Ракета Р-27Р
1 – ГСН, 2 – радиолокационный НВ, 3 – автопилот, 4 – рулевой привод, 5 – гидронасос, 6 – турбогенератор, 7 – газогенератор, 8 – НИМ, 9 – боевая часть, 10 – двигатель

Ракета Р-27Т
Принципиально новые технические решения реализовали и в бортовой аппаратуре ракеты. При использовании обычной полуактивной радиолокационной ГСН на перспективных советских ракетах не удавалось достигнуть превосходства по максимальной дальности над "Сперроу" AIM-7F, так как отечественные самолетные РЛС уступали американским аналогам по потенциалу подстветки, а ГСН ракет – по чувствительности приемника.
Поэтому в ходе разработки для ракет с "радийными" ГСН специалисты НИИП на основании результатов НИР "Агат" приняли комбинированную схему функционирования. На основном участке полета ракеты К-27Р продолжительностью до 30 с осуществляется инерциальное управление с коррекцией по информации, передаваемой по радиоканалу с носителя. На удалении около 25 км от цели ГСН захватывает ее на автосопровождение и переходит в режим самонаведения. В результате максимальная дальность пусков в 2…2,5 раза превысила дальность захвата цели ГСН.
Полуактивная радиолокационная головка самонаведения РГС-27 работает по отраженному от цели излучению работающих в дискретно-импульсном режиме бортовой РЛС Н0-01 или НО-19, установленных, соответственно, на самолетах Су-27 и МиГ-29. Впервые в ГСН применена антенная система с трехосной стабилизацией, при этом гироузел функционирует в качестве платформы навигационной системы, с достаточной точностью решающей задачу осуществления длительного полета в инерциальном режиме. Применяемые в ГСН аналоговое и цифровое вычислительные устройства обеспечивают реализацию адаптивной логики при воздействии естественных и организованных помех. В ГСН реализуются нестационарные фильтры калмановской структуры в виде модели кинематического звена. При этом осуществляется прогнозирование относительной дальности до цели вплоть до ее захвата на автосопровождение. Обеспечивается перестройка коэффициентов автопилота в зависимости от времени, скорости и высоты полета. Головки самонаведения отрабатывают углы целеуказания до ±50°.
Наряду с основным вариантом полета с реализацией метода пропорциональной навигации могут применяться особые режимы наведения, обеспечивающие более благоприятные режимы работы ГСН и радиовзрывателя, в частности, обход области пассивных помех или подход к низколетящей цели с верхней полусферы, снижающие вероятность преждевременного срабатывания радиовзрывателя.
Читать дальшеИнтервал:
Закладка: