Техника и вооружение 2010 05

- Название:Техника и вооружение 2010 05
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2010
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Техника и вооружение 2010 05 краткое содержание
Техника и вооружение 2010 05 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Для движения по воде служили два гребных винта диаметром 700 мм, установленные в специальных кольцевых профилированных насадках. Водяных рулей не было. Управление на плаву осуществлялось поворотом вокруг вертикальной оси колонок с гребными винтами и насадками, которые поворачивались в горизонтальной плоскости. Отбор мощности на гребные винты производился с носков коленчатых валов двигателей карданными валами через разобщительные муфты и конические реверс-редукторы на вертикальные поворотно-откидные колонки с гребными винтами в насадках. В корпусе реверс-редуктора были установлены два вала.

Гидравлическая схема поворота откидной колонки водоходного движителя ЗИЛ-135П.

Поворотно-откидная колонка водоходного движителя ЗИЛ-135П.

Продольный разрез насадка и гребного винта.

Специалисты СКБ ЗИЛ на испытаниях в Балтийске.
Верхний ряд: В.К. Лепешкин, М.А. Зайцев, В. Глебов, В.Г. Иванов, В.М. Андреев.
Нижний ряд: ГА. Семенов, В.М. Жванов, Г.Н. Ефимов, Г.И. Лавров, И.Г. Катков, Н.И. Степанов, М.Н. Каекин, В.А. Афанасьев.

Испытания на озере Сенеж, июль 1965 г.
Первый вал (с левой стороны реверс-редуктора) служил для передачи крутящего момента и изменения направления вращения от разобщительной муфты к валу поворотно-откидных колонок, второй (с правой стороны) – для изменения направления движения амфибии на плаву: он поворачивал колонку, а вместе с ней – насадок и гребной винт. Управление поворотом амфибии на плаву осуществлялось рулевым колесом. С помощью системы тяг и гидроусилителя усилие водителя передавалось на второй вал реверс-редуктора.
При движении по суше колонки с помощью гидроцилиндров гидравлической системы автомобиля поднимались вверх, и гребные винты в насадках прижимались к корпусу в специальную нишу.
Так как новый автомобиль имел несущий стеклопластиковый корпус и не оснащался рамой, в МВТУ им. Н.Э. Баумана под руководством профессора Н.Ф. Бочарова разработали и 11 февраля передали в СКБ ЗИЛ программу испытаний корпуса.
5 января 1965 г. еще не до конца собранный (но уже на ходу) ЗИЛ-135П отправили на взвешивание. Для водоплавающей машины вопросы распределения веса (центровки) являлись одним из главных составляющих успеха, поэтому сверить замеренные величины с заложенными расчетными данными было не лишним.
13 января собрали реверс-редукторы для привода гребных винтов. 22 января на машине установили винты.
6 февраля 1965 г. ЗИЛ-135П был окончательно собран. В этот день состоялась первая проба машины на Москва-реке. Тогда же случилась и первая поломка – скрутился вал привода поворота колонок гребных винтов, и машина потеряла управление на воде. На берег выбирались только с помощью работы колес. 6 апреля была организована вторая проба ЗИЛ-135П, сопровождавшаяся поломкой вала шестерен поворота колонок. Пришлось изменить конструкцию механизма поворота колонок.
После доработок 15 июня ЗИЛ-135П стали готовить к испытаниям на озере Сенеж, которые начались 17 июля на военном полигоне. Здесь амфибия продемонстрировала свои скоростные возможности. Испытания прошли успешно.
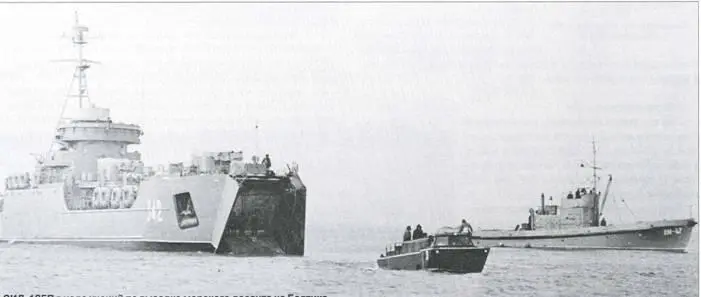
В Балтийске Военные моряки проявляли повышенный интерес к большой амфибии. Так, 2 августа представитель ГУК адмирал Макаров посетил СКБ ЗИЛ, осмотрел ЗИЛ-135П и провел переговоры о возможности испытания машины на море.
В сентябре от ГУК было получено разрешение о проведении испытаний ЗИЛ-135П на море. Всем хотелось поехать на Черное море, но начальник штаба ВМФ СССР адмирал Н.Д. Сергеев определил местом испытаний Балтийское море, район военноморской базы флота в г. Балтийске. Разрешение на базирование и проведение испытаний в указанном районе дал командующий ДКБФ адмирал А.Е. Орел. До Балтийска решено было добираться своим ходом с целью увеличения пробега по бездорожью (основная же цель – маскировка, движение вне основных автомобильных магистралей).

ЗИЛ-135П преодолевает прибойную зону.

Выход на берег.

Динамические испытания на Балтике, октябрь 1965 г.
Испытания ЗИЛ-135П в Балтийске стартовали в октябре 1965 г. Ведущим испытателем стал инженер В.А. Афанасьев, основной водитель-испытатель – И.Г. Катков, ведущий конструктор – Ю.И. Соболев, ведущий инженер от ЦНИИ им. академика А.Н. Крылова -Ю.С. Пунсон. Общее руководство испытаниями как обычно возглавил зам. главного конструктора В.Б. Лаврентьев.
Примечательно, что машина, изначально задуманная Ю.Н. Глазуновым как составная часть понтонно-мостового парка для переправ тяжелой военной техники через большие реки, оказалась прекрасной мореходной амфибией, способной плавать на волнении до 5 баллов, преодолевать при этом прибойную зону с высотой волн до 2 м, обладая хорошей остойчивостью и управляемостью. Впрочем, все мореходные характеристики амфибии были отработаны на ее модели в опытовом бассейне ЦНИИ им. академика А.Н. Крылова задолго до постройки натурного образца.
22 ноября по телефону В.Б. Лаврентьев доложил В.А. Грачеву о заключительном этапе испытаний 135П и о составлении акта. 25 ноября амфибия ЗИЛ-135П и машины сопровождения выехали из Балтийска и 30 ноября прибыли в Москву своим ходом.
15 января 1966 г. с машиной ознакомился начальник ЦАВТУ генерал-полковник А.С. Бурдейный, однако большого интереса к амфибии не проявил.
16 февраля состоялся техсовет по ЗИЛ-135П с участием представителя ГУК капитана 1 ранга Ю.И. Нестерова, Ю.Н. Глазунова, Ю.С. Пунсона, военпреда Ю.В. Исполатова и членов техсовета СКБ В.А Грачева, Ю.И. Соболева и других о дальнейших работах по мореходной амфибии. В конце мая, после многочисленных консультаций, было принято решение о продолжении испытаний амфибии, включая зимний период.
Читать дальшеИнтервал:
Закладка: