Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Работа устройства
Перед тем как мы приступим к конструированию робота, посмотрим на готового робота, изображенного на рис. 11.5, и проанализируем, как робот осуществляет передвижение. Треножная походка, которая использована в данной конструкции, является не единственно возможной.
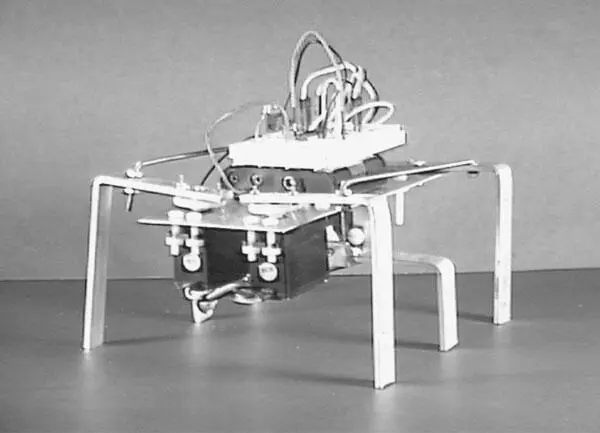
Рис. 11.5. Шестиногий ходок готов к прогулке
В передней части робота закреплены два сервомотора. Каждый из сервомоторов управляет движением передней и задней ног с соответствующей стороны робота. Передняя нога прикреплена непосредственно к ротору сервомотора и способна качаться вперед и назад. Задняя нога соединена с передней при помощи тяги. Тяга позволяет задней ноге повторять движения передней ноги вперед-назад. Две центральные ноги управляются третьим сервомотором. Этот сервомотор поворачивает центральные ноги вдоль продольной оси на угол от 20° до 30° по часовой стрелке и против часовой стрелки, что наклоняет робот вправо или влево.
Используя информацию о механизме привода ног, мы сейчас посмотрим, как наш робот будет передвигаться. Посмотрим на рис. 11.6. Мы начнем с положения покоя. Каждый кружок отмечает положение ноги. Как и в предыдущем случае, темные кружки показывают положение опорных ног. Обратите внимание, что в положении покоя средние ноги не являются опорными. Эти ноги на 3 мм короче передних и задних ног.
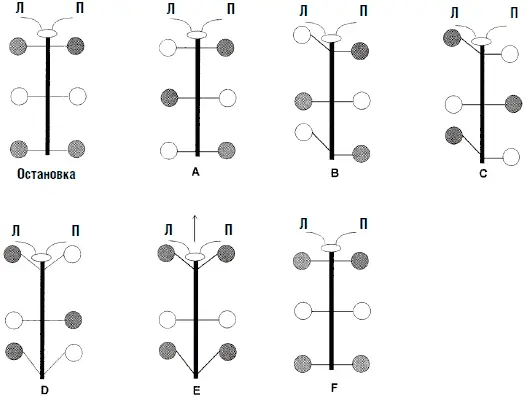
Рис. 11.6. Фазы движения шестинога
В позиции А центральные ноги поворачиваются по часовой стрелке на угол примерно 20° от центрального положения. Это приводит к наклону робота вправо. В данной позиции вес робота удерживается правой передней и задней ногами и левой центральной ногой. Это стандартная позиция «треножника», которая была описана выше. Поскольку левая передняя и левая задняя нога оказываются «в воздухе», то их можно передвинуть вперед, как показано на рис 11.6, позиция В.
В позиции С центральные ноги поворачиваются против часовой стрелки на угол примерно 20° от центральной позиции. Это приводит к наклону робота влево. В данной позиции вес робота распределяется между левой передней и задней ногами и правой средней ногой. Теперь правая передняя и задняя ноги не несут нагрузки и могут быть передвинуты вперед, как это показано на поз. D рис. 11.6.
В позиции Е центральные ноги возвращаются в среднее положение. В такой позиции робот «стоит» прямо и опирается только на передние и задние ноги. В позиции F передние и задние ноги одновременно перемещаются назад, а робот соответственно – вперед. Далее цикл движения повторяется.
Это был первый способ хождения, который я попробовал воспроизвести, и эта система работает. Вы можете разработать, совершенствовать и конструировать другие модели способов хождения, с которыми можно проводить эксперименты. Я оставлю вам разработку способов хождения назад (реверсирование) и поворотов направо и налево. Я буду продолжать совершенствовать этого робота, добавляя датчики наличия стен и препятствий, а также способов перемещения назад и поворотов.
Конструкция робота
За основу «тела» робота я взял лист алюминия размерами 200х75х0,8 мм. Сервомоторы прикреплены к передней части пластины (см. рис. 11.7). Разметка отверстий под сервомоторы должна быть скопирована с чертежа и перенесена на лист алюминия. Такое копирование обеспечит точность положения отверстий под крепления сервомоторов. Четыре отверстия диаметром 4,3 мм расположены немного позади средней линии и предназначены для крепления центрального сервомотора. Эти четыре отверстия смещены к правому краю. Это необходимо сделать для того, чтобы фланец центрального сервомотора находился точно по центру «тела». Два задних отверстия предназначены для подвижного крепления задних ног.
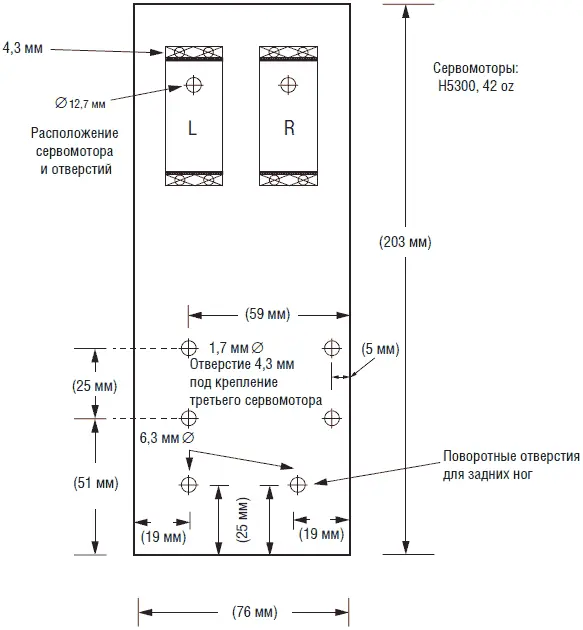
Рис. 11.7. Основание «тела»
Для разметки центров отверстий под сверление необходимо использовать кернер. В противном случае при сверлении отверстий сверло может «увести». Если у вас нет кернера, вы можете использовать в качестве неплохой замены острый гвоздь.
Ноги робота изготовлены из алюминиевой полосы шириной 12 мм и толщиной 3 мм (см. рис. 11.8). В передних ногах просверливается по четыре отверстия. В задних ногах сверлятся два отверстия: одно для подвижного крепления, а другое – для крепления тяги. Обратите внимание, что задние ноги на 6 мм короче передних. Это объясняется тем, что необходимо учитывать высоту фланца сервомотора, к которому крепятся передние ноги, над общим уровнем пластины. Укорочение задних ног выравнивает положение платформы.
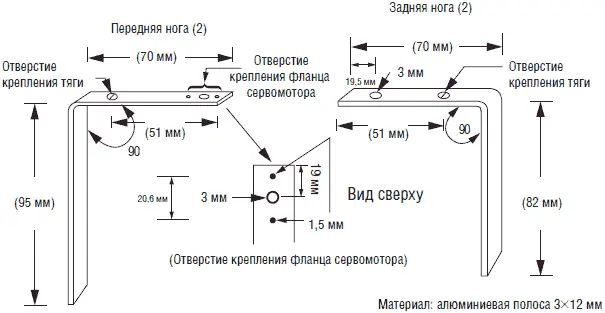
Рис. 11.8. Конструкция передних и задних ног
После сверления необходимых отверстий необходимо согнуть алюминиевую полосу по нужной форме. Зажмите полосу в тиски со стороны высверленных отверстий на расстоянии 70 мм. Нажмите на пластину и согните ее под углом 90°. Лучше всего нажимать на пластину непосредственно около губок тисков. При этом пластина согнется под углом 90° без риска выгибания самой «нижней» части ноги.
Центральные ноги выполнены из одного куска алюминия (см. рис. 11.9). При креплении к роботу центральные ноги оказываются на 3 мм короче передних и задних ног. Таким образом, в среднем положении они не касаются земли. Эти ноги предназначены для наклона робота вправо и влево. При вращении центрального сервомотора ноги наклоняют робота на угол примерно ±20°.
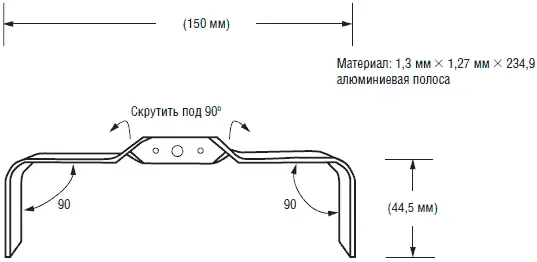
Рис. 11.9. Средние ноги
При изготовлении центральных ног в алюминиевой полосе размером 3х12х235 мм сверлятся сперва три центральных отверстия под фланец сервомотора. Затем алюминиевая полоса крепится в тиски, причем губки тисков по верхнему краю должны фиксировать полосу на расстоянии 20 мм от центра полосы. Зажмите полосу с помощью плоскогубцев на расстоянии примерно 12 мм от верхнего края тисков. Сохраняя зажим плоскогубцев, аккуратно скрутите алюминиевую полосу на угол 90°. Производите операцию достаточно медленно, иначе можно легко сломать пластину. Аналогично скрутите пластину с другой стороны.
После того как скручивание на 90° произведено, дополнительно согните пластину в двух местах на 90°, как мы это делали для передних и задних ног.
Читать дальшеИнтервал:
Закладка:








