Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Идею создания подобного робота первоначально выдвинул Ричард Вейт из Северного Йорка, Торонто. Ричард построил робота, ищущего источник света, заключенного в прозрачную сферу (шар). Затем, в более недавнее время, Дейв Хранкиу из Калгари, Канада, так сказать, «поднял этот шар» и построил серию передвижных роботов – солнечных шаров, ищущих источники света.
Можно отметить два любопытных качества, которыми обладают подобные роботы (см. рис. 12.1). Первое из них – способ передвижения. Внутрь шара помещен редуктор. Один из концов вала редуктора наглухо прикреплен к внутренней стороне поверхности прозрачной сферы. Жесткое крепление вала редуктора препятствует его вращению, что вынуждает вращаться сам редуктор. Редуктор имеет достаточно большой вес, что перемещает центр тяжести сферы вперед. По этой причине сама сфера катится вперед.
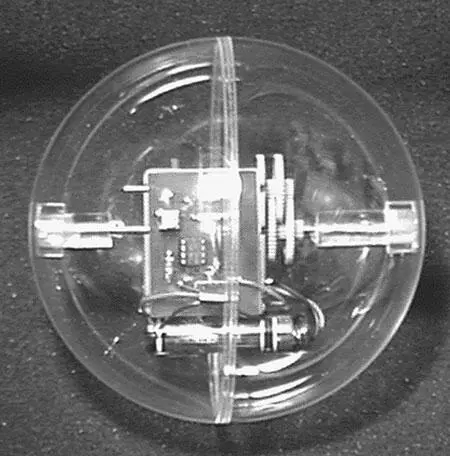
Рис. 12.1 Робот – солнечный шар
В состоянии покоя центр тяжести редуктора находится в нижней мертвой точке (нижнее положение редуктора), и шар покоится, т. е. оказывает сопротивление качению. При включении редуктора он начинает вращаться внутри шара. Это вращение перемещает центр тяжести шара вперед, и шар, таким образом, катится в прямом направлении.
Второе качество относится к способу питания конструкции редуктора. Первоначально солнечные роботы имели бортовой источник питания, что позволяло подводить питание к редуктору в прерывистом режиме (более подробно это было изложено в гл. 3). Бортовой источник питания состоит из батареи солнечных элементов, основного конденсатора и триггерной или низкочастотной генерирующей схемы. При освещении световым потоком солнечная батарея начинает заряжать основной конденсатор. Когда значение напряжения на конденсаторе достигнет пороговой величины, триггерная схема пропускает накопленный заряд через двигатель с высоким КПД, соединенный с редуктором, что вызывает небольшое перемещение робота вперед.
В данной конструкции робота использована аналогичная конструкция редуктора, но для его питания использованы два элемента АА. Недостатком батарей является необходимость их замены после использования. Однако их преимущество в том, что питание на схему робота подается постоянно, что позволяет нам легко изучать его поведение (в основном фототропизм), движение и перемещения.
В оригинальной конструкции робота для изучения этих эффектов требовался метод замедленной съемки. В зависимости от уровня освещенности, каждая зарядка конденсатора занимает несколько минут. Когда заряд протекает через двигатель, робот чуть-чуть откатывается вперед. Например, 10 часов движения оригинальной модели солнечного робота сжимаются в несколько минут при изучении данной конструкции.
Данному роботу не требуется электронных схем управления бортовым источником питания, однако и ему необходим световой выключатель. Схема, изображенная на рис. 12.2, управляет подачей напряжения от батареи на двигатель редуктора. Схема определяет уровень освещенности, «видимой» роботом. Если уровень освещенности достаточно высок, то схема включает двигатель. Пороговое значение уровня освещенности может регулироваться с помощью переменного резистора V1.
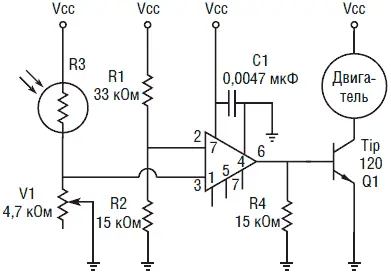
Рис. 12.2. Принципиальная электрическая схема солнечного шара
Конструкция редуктора
Перед тем как мы приступим к изготовлению робота, давайте посмотрим на конструкцию редуктора (см. рис. 12.3). Физические размеры редуктора меньше обычных и его легче смонтировать внутри сферы. Передаточное число редуктора 1000:1. Чем больше передаточное число, тем медленнее будет двигаться робот.
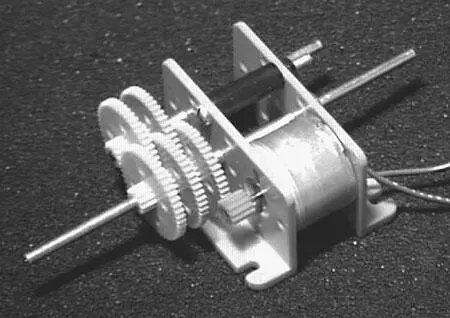
Рис. 12.3. Редуктор с отношением 100:1
В прототипе использован редуктор с передаточным числом 1000:1. Вы можете использовать любой другой редуктор, умещающийся в прозрачной сфере с внутренним диаметром 140 мм. Выберете редуктор с большим передаточным числом, что позволит уменьшить частоту вращения (7 об/мин).
Конструкция робота
Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин прозрачные сферы продаются во многих магазинах, специализирующихся на товарах для любителей. Подобные сферы используются любителями для размещения в них различных поделок «выходного дня». Если вы не сможете приобрести такую сферу в местном магазине, то можете заказать ее в Images SI (см. список деталей конструкции в конце главы). Пластиковый корпус является хрупким. Не заставляйте вашего робота подниматься или спускаться по ступеням, корпус может разбиться, что приведет конструкцию в негодность.
Разделите две половины корпуса. Сперва необходимо точно определить геометрический центр каждой полусферы. В этих точках будут присоединяться концы вала редуктора. Определение положения точки центра может показаться более легким, чем это есть на самом деле. Для отыскания центра я был вынужден нарисовать на бумаге окружность по периметру полусферы, затем нарисовать квадрат вокруг окружности со сторонами, касающимися окружности (см. рис. 12.4). Проведя диагонали квадрата, я нашел геометрический центр окружности. Затем полусфера была помещена на рисунок окружности. Если вы держите голову прямо напротив сферы, вы сможете визуально определить центр и отметить его на сфере с помощью маркера. Я попробовал этот способ раз или два, но результаты были неудовлетворительны. В конце концов, я наклеил бумагу на фанеру толщиной 1,5 мм и просверлил небольшое отверстие в отмеченном центре. Затем я взял небольшой штырь длиной 63 мм и зафиксировал его в отверстии, следя за тем, чтобы он был перпендикулярен плоскости. Возьмите полусферу за обод и совместите ее диаметр с нарисованной окружностью. Конец штыря укажет положение центра с большой точностью. Отметьте положение центра сперва на одной полусфере, а затем – на второй.
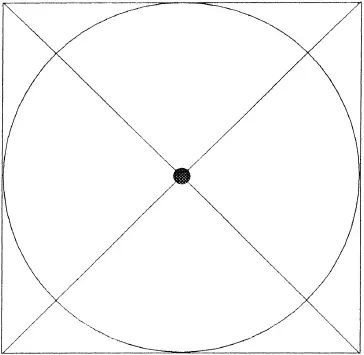
Рис. 12.4. Чертеж для нахождения центра окружности
Следующим шагом будет изготовление запорного устройства фиксатора внутри сферы, которое будет препятствовать свободному вращению вала редуктора внутри сферы. Поскольку вал зафиксирован, то это приводит к вращению самого редуктора внутри сферы. При этом центр тяжести перемещается, и робот двигается вперед. В то же время конструкция фиксатора вала редуктора должна обеспечивать по необходимости разъем и соединение половин сферы. Система, которую я использую, иллюстрирована рис. 12.5 и 12.6. Для этой цели мной был использован тот же тип прозрачного пластика, из которого сделана сфера, а вы можете изготовить эти части из других материалов, например из латуни или дерева.
Читать дальшеИнтервал:
Закладка:








