Джон Ловин - Создаем робота-андроида своими руками

- Название:Создаем робота-андроида своими руками
- Автор:
- Жанр:
- Издательство:Литагент «ДМК»233a80b4-1212-102e-b479-a360f6b39df7
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Джон Ловин - Создаем робота-андроида своими руками краткое содержание
Эта книга – отличный подарок для тех, кто собирается строить робота в первый раз, а также будет полезна и более опытным «роботостроителям», которые хотят отточить свое мастерство. Базовых знаний в области радиоэлектроники окажется вполне достаточно, чтобы книга помогла вам осуществить 12 отличных робототехнических проектов с использованием как промышленных частей и деталей (полные списки прилагаются), так и различного домашнего хлама, вытащенного с антресолей.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Установка сервомоторов
Передние сервомоторы крепятся к алюминиевому основанию с помощью пластиковых винтов и гаек 3 мм. Я выбрал пластиковые винты, поскольку их можно слегка гнуть и компенсировать небольшие несоответствия положений просверленных в пластине отверстий и крепежных отверстий сервомотора.
Ноги крепятся к пластиковому фланцу сервомотора. Для этого я использовал 2 миллиметровые винты и гайки. При креплении фланца к валу сервомотора убедитесь, что каждая нога может отклоняться вперед-назад на одинаковый угол от среднего перпендикулярного положения.
Конструкция тяги
Тяга между передними и задними ногами изготовлена из прутка с резьбой 3 мм (см. рис. 11.10). В исходной конструкции длина тяги составляет 132 мм от центра до центра. Тяга вставляется в отверстия на передней и задней ноге робота и может быть закреплена с помощью нескольких гаек.
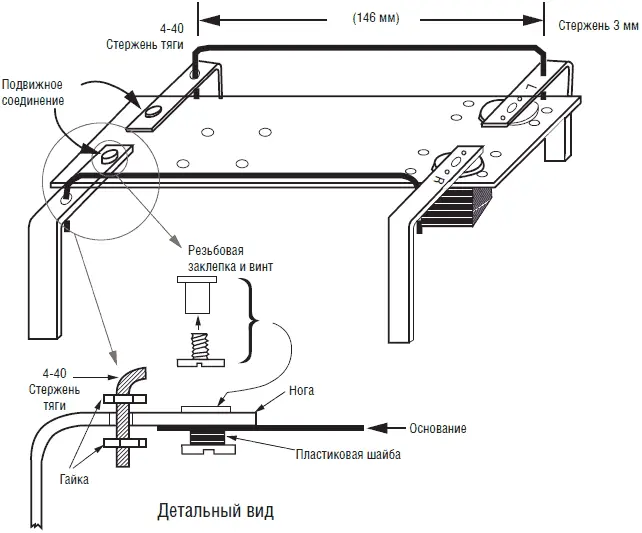
Рис. 11.10. Детальный чертеж шарнира и тяги
Перед установкой тяги задние ноги робота должны быть прикреплены к основанию. Крепление задних ног изготовлено из резьбовой заклепки 9,5 мм и крепежного винта. Детальное крепление ноги показано на рис. 11.10. Необходимо подложить пластиковые шайбы под основание, которые заполнят пространство между нижней частью основания и головкой винта. Такая конструкция обеспечивает крепление ноги к основанию без ее «болтания». Чтобы уменьшить трение, можно использовать пластиковые шайбы. Не используйте слишком много шайб – это приведет к излишнему прижиму ноги к поверхности основания. Нога должна поворачиваться в соединении достаточно свободно. На рис. 11.11 и 11.12 приведены фотографии частично собранного шестиногого робота.
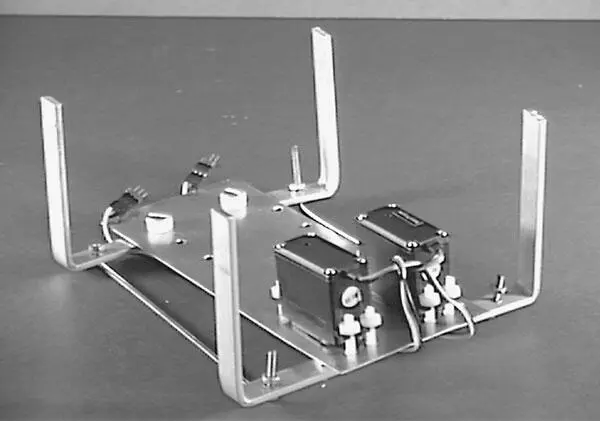
Рис. 11.11. Шестиног – вид снизу. Спереди два сервомотора
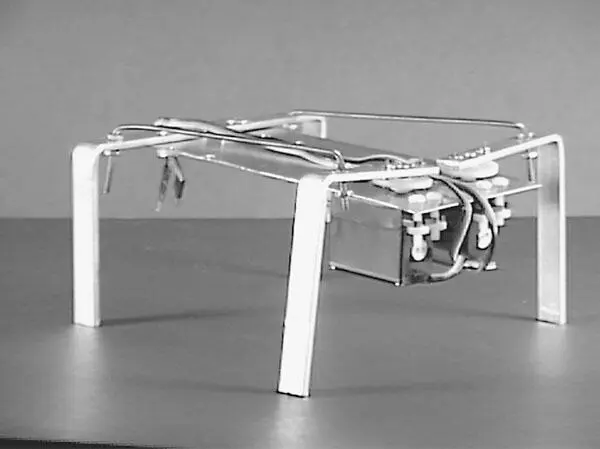
Рис. 11.12. Частично собранный шестиног с двумя передними сервомоторами
Центральный сервомотор
Для крепления центрального сервомотора потребуются две Г-образные скобы (см. рис. 11.13). Просверлите соответствующие отверстия в алюминиевых полосках и согните их под углом 90°, чтобы получились скобы. Прикрепите две Г-образные скобы к центральному сервомотору с помощью пластиковых винтов и гаек (см. рис. 11.14). Затем прикрепите узел центрального сервомотора к нижней части основания. Совместите четыре отверстия на основании с отверстиями на верхней части Г-образных скоб. Скрепите части с помощью пластиковых винтов и гаек. На рис. 11.15 и 11.16 приведены фотографии вида сверху и снизу для шестиногого робота.
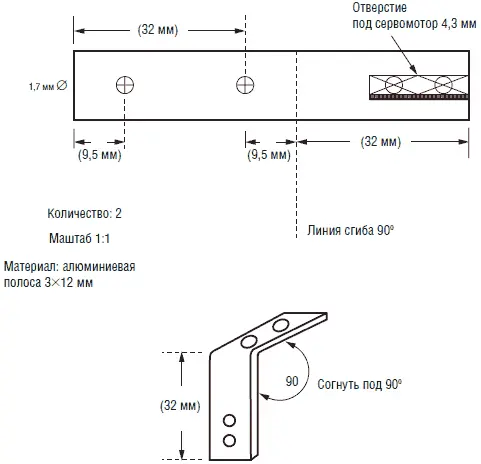
Рис. 11.13. Скоба центрального сервомотора
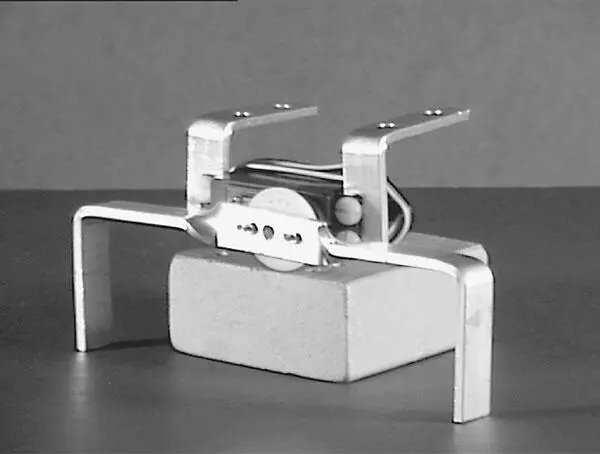
Рис. 11.14. Центральный мотор в сборе с крепежными скобами и средними ногами
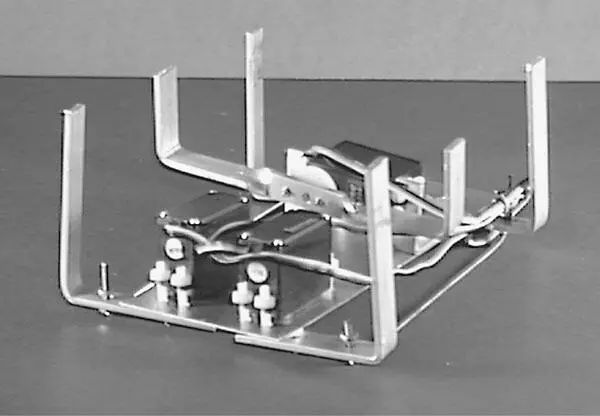
Рис. 11.15. Шестиног – вид снизу с тремя сервомоторами
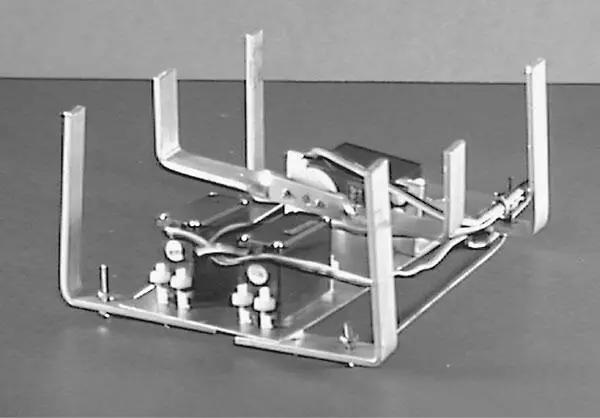
Рис. 11.16. Шестиног в сборе. Конструкция готова для монтажа электронного управления
Электрическая часть
На рис. 11.17 приведена схема управления сервомоторами с помощью PIC-микроконтроллера. Питание сервомоторов и микроконтроллера осуществляется от батареи 6 В. Батарейный отсек 6 В содержит 4 элемента АА. Схема микроконтроллера собрана на небольшой макетной плате. Батарейный отсек и схема прикреплены сверху к алюминиевому основанию. На рис 11.5 показана готовая конструкция робота, готовая к «передвижению».
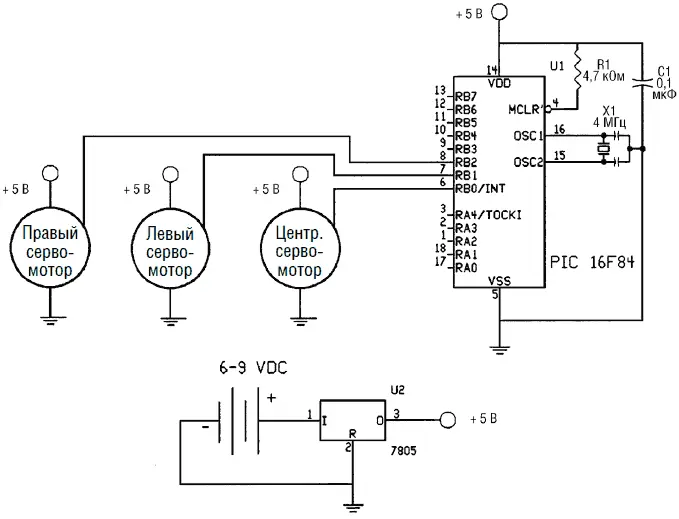
Рис. 11.17. Принципиальная схема управления шестиногого робота
Программа для микроконтроллера
Микроконтроллер 16F84 управляет работой трех сервомоторов. Наличие большого числа незадействованных шин ввода/вывода и места под программу предоставляет возможность совершенствования и модификации базовой модели робота.
Программа PICBASIC
‘Шестиногий шагающий робот
‘Соединения
‘Левый сервомотор Pin RB1
‘Правый сервомотор Pin RB2
‘Сервомотор наклона Pin RB0
‘Движение только вперед
start:
for B0 = 1 to 60
pulsout 0, 155 ‘Наклон по часовой стрелке, подъем правой стороны
pulsout 1, 145 ‘Левые ноги на месте
pulsout 2, 145 ‘Правые ноги движутся вперед
pause 18
next B0
for B0 = 1 to 60
pulsout 0, 190 ‘Наклон против часовой стрелки, подъем левой стороны
pulsout 1, 200 ‘Левые ноги движутся вперед
pulsout 2, 145 ‘Правые ноги сохраняют положение вперед
pause 18
next B0
for B0 = 1 to 15
pulsout 0, 172 ‘Среднее положение, отсутствие наклона
pulsout 1, 200 ‘Левые ноги сохраняют положение вперед
pulsout 2,145 ‘Правые ноги сохраняют положение вперед
pause 18
next B0
for B0 = 1 to 60
pulsout 0, 172 ‘Среднее положение, отсутствие наклона
pulsout 1, 145 ‘Движение левых ног назад
pulsout 2, 200 ‘Движение правых ног назад
pause 18
next B0
goto start
На команду pulsout не все сервомоторы реагируют одинаковым образом. Возможно, что для создания робота вы приобретете сервомоторы, характеристики которых будут слегка отличаться от тех, которые были использованы мной. В этом случае обратите внимание на то, что параметры команды pulsout, которая определяет положение ротора сервомотора, должны быть подстроены. В этом случае необходимо подобрать численные значения параметров pulsout, которые бы соответствовали тому типу сервомотора, который использован в вашей конструкции шестиногого робота.
Данная программа на PICBASIC позволяет роботу двигаться только в прямом направлении, однако, немного изменив программу, конструктор может заставить робота двигаться назад и совершать повороты вправо и влево. Установка нескольких сенсорных датчиков может информировать робота о наличии препятствий.
Список деталей конструкции шагающего робота
• Сервомоторы
• Микроконтроллеры 16F84
• Алюминиевые полосы
• Алюминиевый лист
• Прутки и гайки с резьбой 3 мм
• Пластиковые винты, гайки и шайбы
Детали можно заказать в:
Images Company
39 Seneca Loop
Staten Island, NY 10314
(718) 698-8305
http://www.imagesco.com
Глава 12
Робот – солнечный шар
Интервал:
Закладка:








