Евгений Шанихин - Глубоководные аппараты (вехи глубоководной тематики)

- Название:Глубоководные аппараты (вехи глубоководной тематики)
- Автор:
- Жанр:
- Издательство:Восточный горизонт
- Год:2003
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Евгений Шанихин - Глубоководные аппараты (вехи глубоководной тематики) краткое содержание
Вниманию читателей предлагается книга, посвященная созданию первого поколения отечественных обитаемых подводных аппаратов, предназначенных для работы на глубинах более 1000 м История подводного флота, несмотря на вал публикации последнего времени, остается мало известной не только широкой общественности, но и людям, всю жизнь проработавшим в отрасли Между тем. сложность задач, стоящих перед участниками работ по «глубоководной тематике» – так это называлось в Министерстве судостроительной промышленности – можно сравнить только с теми, что пришлось решать создателям космических кораблей Но если фамилии Королева и Гагарина известны всему миру, го о главном конструкторе глубоководной техники Юрии Константиновиче Сапожкове или первом капитане-глубоководнике Михаиле Николаевиче Диомидове читатель впервые узнает из этой книги.
Автор постарался показать процесс создания и испытаний подводного аппарата как сложной технической системы, входящей, в свою очередь, в еще более сложный комплекс подводно-технических работ. На живых и наглядных примерах показано, как забвение или недооценка системного подхода затрудняла создание и использование глубоководной техники
Глубоководные аппараты (вехи глубоководной тематики) - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Система предусматривала автоматическую отдачу аварийных грузов при превышении установленной глубины погружения ГА, дистанционное управление бортовыми системами и устройствами, а также световую сигнализацию текущего положения устройств и арматуры.
Для безусловной надежности работы всех систем, устройств и корпусных конструкций предусматривались увеличение коэффициента запаса прочности прочного корпуса до 1,5 от рабочего давления, непременная проверка всех прочных конструкций перед их установкой на ГА наружным испытательным давлением, ударостойкость не менее 5 g, работоспособность после воздействия температур от 5 до 50° С, степень надежности – не менее 0,99.
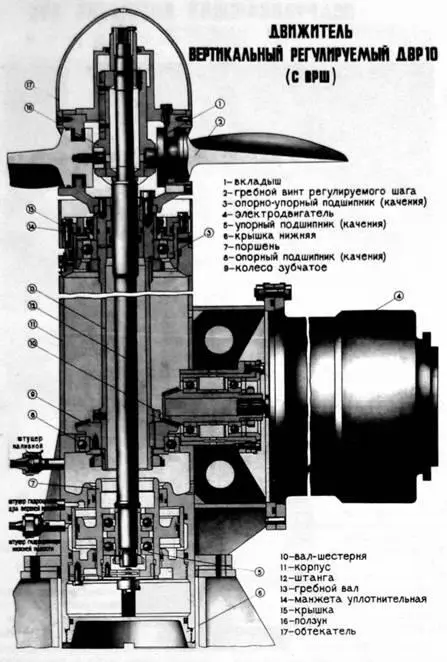
Вертикальный винт регулируемого шага
Для обеспечения высокой степени безопасности экипажа были предусмотрены гидравлические резаки тросов подводных якорей с электрическим управлением из прочного корпуса; контейнер с твердым балластом массой в воде, равной массе воды в полном объеме уравнительной цистерны, отдавался подрывом пироболтов его крепления с электрическим управлением с пульта командира; затвор дифферентной системы, выпускающий из нее ртуть, можно было открыть подрывом пиропатрона с электрическим управлением с пульта командира; контейнер с вспомогательной аккумуляторной батареей отдавался подрывом пироболтов его крепления с электрическим управлением с пульта командира.
Источники электропитания всех аварийных средств, средства регенерации воздуха и пожаротушения в прочном корпусе, средства радиосвязи были дублированы.
Состав радиоэлектронного вооружения по эскизному проекту 1832 значительно превосходил таковой на 1825-м.
Для инструментального поиска находящихся на материковом склоне объектов разрабатывалась поисковая гидролокационная станция кругового и бокового обзора с необходимой дальностью действия и разрешающей способностью. Для точного определения места подводного объекта и текущего места положения ГА проектом предусматривалась навигационная гидроакустическая система с донными маяками-ответчиками, устанавливаемыми как с борта аппарата, так и с борта судна-носителя.
Для обозначения текущего местоположения ГА на его борту ставился акустический маяк-ответчик системы слежения судна-носителя. Для счисления текущих трехмерных относительных координат аппарата создавался навигационный комплекс в составе гирокомпаса, акустического (абсолютного) и индукционного лагов, глубиномера, эхолота и автопрокладчика пройденного пути с необходимой точностью и погрешностью. Для двухсторонней симплексной связи судна-носителя с "Поиском-2" в подводном положении проектом предусматривалась разработка гидроакустической станции связи, которая, кроме того, обеспечивала в автоматическом режиме подачу сигналов для пеленгования ГА с судна-носителя.

Подруливающее устройство
Для двухсторонней симплексной связи с судном-носителем в надводном положении проектом предусматривалась КВ радиостанция с антенно-фидерным устройством и дублирующая УКВ-радиостанция.
Для визуального наблюдения забортной обстановки в носовой полусфере при проведении подводных работ в носовой переборке установили три конических иллюминатора диаметром в свету 140 мм из органического стекла. Средний из них вооружался бинокулярной зрительной трубой с кинокамерой для работы манипуляторным устройством.
В зоне пульта командира устанавливался иллюминатор с монокулярной зрительной трубой для наблюдения забортной обстановки в верхней полусфере при всплытии ГА. Кроме того, для наблюдения за внешней средой в носовой полусфере в подводном и надводном положении предусматривалась разработка глубоководной телевизионной установки с двумя камерами на суперартиконах и тремя (по числу членов экипажа) видеопросмотровыми устройствами, обеспечивающими наблюдение по курсу и в зоне работы манипуляторного устройства.
Для связи ограждения входного люка и поста командира на ГА использовалась оперативная безбатарейная телефонная связь. Ведение бортового журнала и запись переговоров экипажа производилось на проволочный аудиомагнитофон.
Для выполнения НИР предусматривалась установка на 1832-м экспериментальных или опытных образцов аппаратуры измерения текущих физических параметров водной среды, магнитного и гравитационного полей Земли, радиационного поля, текущей скорости распространения звука в воде, глубоководной стереофотоустановки и высокоточного глубоководного измерителя глубин.
Помимо использования стереофотоустановки. результаты измерения всех вышеперечисленных параметров в течение всего времени пребывания "Поиска-2" под водой предусматривалось записывать многополосной магнитно-регистрирующей аппаратурой с последующей расшифровкой на специальной аппаратуре судна- носителя. Измерения этих параметров предусматривалось производить при погружении, зависании и подводном ходу на определенном горизонте в пределах рабочей глубины погружения. Стереофотоустановка должна была картографировать дно при движении ГА с фиксированной скоростью на расстоянии 4-6 м от грунта.
Для выполнения подводно-технических работ предусматривалась разработка и установка на "Поиск-2" электрогидравлического манипуляторного устройства, имеющего два полутораметровых исполнительных органа с шестью степенями свободы, обеспечивающих в пределах обслуживаемой зоны в носовой оконечности ГА:
– захват и доставку грузов весом в воде до 30 кГс;
– захват сменным ковшом и доставку сыпучих грузов весом в воде до 20 кГс;
– проворачивание маховиков диаметром до 200 мм;
– отдачу задраек и открывание откидных лючков выгородок аварийно- спасательных устройств затонувших подводных лодок (ЗПЛ);
– продергивание оборудованного специальной иглой троса-проводника через головку устройства ШУ-200 ЗПЛ;
– подсоединение карабина с тросом к рыму поднимаемого предмета;
– отворачивание гаек-заглушек;
– расчистку комингс-площадок ЗПЛ от посторонних предметов;
– работу с инструментом, сменяемым под водой и размещаемым в выдвижном лотке.
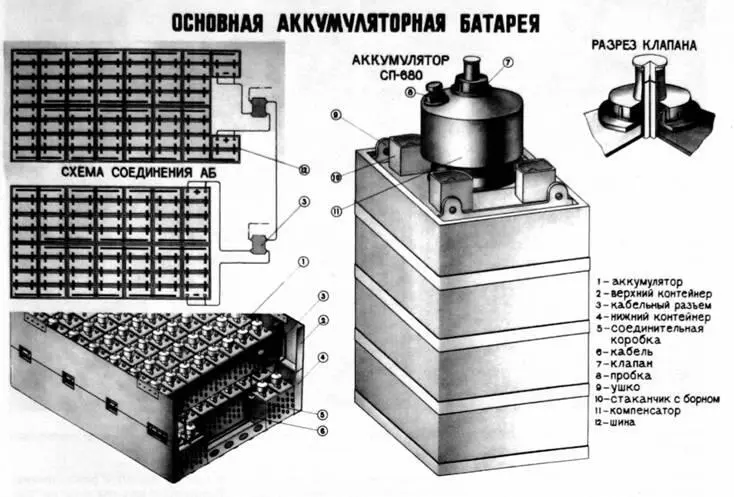
Основная аккумуляторная батарея
Манипуляторное устройство управлялось задающими органами из зоны поста помощника командира по НИР, при этом исполнительные органы отслеживали положение всех звеньев задающих. В захвате предусматривалось слабое звено, обеспечивающее его аварийную отдачу при усилиях, превышающих 30 кГс.
Читать дальшеИнтервал:
Закладка: