Мередит Бруссард - Искусственный интеллект [Пределы возможного] [litres]
![Мередит Бруссард - Искусственный интеллект [Пределы возможного] [litres]](/books/1073206/meredit-brussard-iskusstvennyj-intellekt-predely.webp "Обложка книги")
- Название:Искусственный интеллект [Пределы возможного] [litres]
- Автор:
- Жанр:
- Издательство:Литагент Альпина
- Год:2020
- Город:Москва
- ISBN:978-5-0013-9230-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Мередит Бруссард - Искусственный интеллект [Пределы возможного] [litres] краткое содержание
Всеобщий энтузиазм по поводу применения компьютерных технологий, по ее убеждению, уже привел к огромному количеству недоработанных решений в области проектирования цифровых систем. Выступая против техношовинизма и социальных иллюзий о спасительной роли технологий, Бруссард отправляется в путешествие по компьютерному миру: рискуя жизнью, садится за руль экспериментального автомобиля с автопилотом; задействует искусственный интеллект, чтобы выяснить, почему студенты не могут сдать стандартизованные тесты; использует машинное обучение, подсчитывая вероятность выживания пассажиров «Титаника»; как дата-журналист создает программу для поиска махинаций при финансировании кандидатов в президенты США.
Только понимая пределы компьютерных технологий, утверждает Бруссард, мы сможем распорядиться ими так, чтобы сделать мир лучше.
Искусственный интеллект [Пределы возможного] [litres] - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Разум – вот ключевая проблема. А поскольку не существует способа запрограммировать теорию мышления, машина никогда сможет реагировать на препятствия так же, как человек. Компьютер «знает» только то, что ему «сказали». Без разума , когнитивной возможности прогнозировать будущее, невозможно за долю секунды решить, что светофор представляет собой препятствие, и принять соответствующие меры.
В рамках разработки ИИ проблема разума была центральной с самого момента основания дисциплины. В конечном итоге Минский назвал ее сложнейшей задачей. Возможно, именно поэтому в Стэнфорде и Карнеги даже не пытаются пользоваться этим подходом. Они избрали радикально противоположный путь решения проблемы объезда препятствий. Подход слабого ИИ исключительно механистичен и опирается на набор неоправданно эффективных данных. И этот подход сработал лучше, чем ожидалось. Мне нравится думать об этом как о задаче робота Карела.
В 1981 г. профессор Стэнфорда Ричард Паттис представил учебный язык программирования под названием Karel the Robot [103] “Karel the Robot.”
. Карел – в честь Карела Чапека, изобретателя слова «робот». Карел не был настоящий роботом, а представлял собой стрелку в разлинованном на клетки квадрате, все это было нарисовано на листе бумаги. Студенты представляли, что стрелка и есть робот, – так они изучали основы программирования. В квадрате был один или несколько выходов. Карел мог двигаться по клеточкам подобно пешке в шахматах. Задача состояла в том, чтобы помочь Карелу выбраться из коробки. Это вводное упражнение, выполняемое при помощи бумаги и ручки, годами было первым заданием на курсах программирования в МТИ, Гарварде, Стэнфорде и других технологических центрах. Профессор рисовал квадратик. В нем было несколько препятствий. Наша задача состояла в том, чтобы написать команды для Карела и вытащить его из заточения, миновав все препятствия. Не то чтобы это было весело, но не так скучно, как математика и другие дисциплины, на которые я ходила на первом курсе. Вот как выглядит типовое упражнение (рис. 8.1). А вот и инструкция к этой загадке: «Каждое утро Карел просыпается в своей кровати, когда газета оказывается на крыльце его дома. Запрограммируйте Карела так, чтобы он забрал газету и вернулся в постель. Газету кидают каждое утро на одно и то же место, а окружающий мир, в том числе кровать, расположены так, как показано на рисунке». Стрелка – это Карел; предполагается, что он находится в постели, отправной точке задачи. Чтобы добраться до газеты, ему нужно повернуть на 90° на север, пройти две клеточки в этом направлении, затем две клеточки на запад и так далее, до тех пор, пока он не достигнет цели.
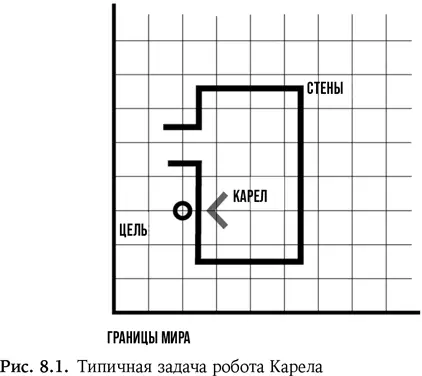
Решение кроется в том, что нам заранее известны препятствия и мы помогаем Карелу обойти их. Программист видит сетку, которая одновременно является картой мира Карела. Эта сетка хранится в памяти Карела, он как бы ее «представляет». Именно таким подходом воспользовалась команда Университета Карнеги – Меллона, чтобы построить свою беспилотную машину. При помощи лазерного радара, камер и сенсоров генерировалась трехмерная карта окружающего пространства. В ней не было «объектов», подлежащих «распознаванию», скорее, в ней были зоны, где можно и нельзя передвигаться, которые система идентифицировала при помощи машинного обучения. Объекты вроде машин представали в виде трехмерных шаров. Последние были препятствиями, подобно тем, что мы видели в задаче с роботом Карелом.
Это превосходное решение, поскольку оно позволяет резко сократить количество переменных, которые Boss или Junior необходимо учитывать. «Малышу Бену» приходилось идентифицировать все объекты в поле зрения – дороги, пешеходов, здания и дорожные конусы – и затем прогнозировать, где объект окажется в ближайшем будущем. Таким образом, каждое предположение требовало решения сложных уравнений. Boss и Junior не нужно было этого делать, в них уже была загружена трехмерная карта местности и дорога, по которой следует проехать, а при помощи машинного обучения они определяли, по каким конкретно частям карты можно ехать, а по каким – нет. Подход, примененный при разработке Boss и Junior, – это слабый ИИ, опирающийся на технологии качественного картирования.
Машина самостоятельно двигалась согласно созданной ею же карте местности. По сути, у нее была своя сетка, как у Карела. Системе оставалось лишь объезжать препятствия. Если в изначальной карте не было дорожного конуса, он учитывался постфактум. Если же он был, то распознавался как статичный объект и вычислялся заранее – это избавляло процессор от идентификации объекта во время движения.
У команды Университета Карнеги было преимущество, поскольку к тому моменту она уже годами работала над управляемыми компьютером транспортными средствами. В 1989 г. они запустили ALVINN – первый беспилотный фургон [104] Pomerleau, “ALVINN, an Autonomous Land Vehicle in a Neural Network”; Hawkins, “Meet ALVINN, the Self-Driving Car from 1989.”
. Это был поистине удачный период. Оказалось, что основатель Google Ларри Пейдж заинтересован в цифровом картировании. Он установил кучу камер на грузовике и проехал по Маунтин-Вью в Калифорнии, снимая окружающий ландшафт и параллельно пересчитывая изображения в базу данных карты. Впоследствии Google реализовал проект под названием Google Street View. Идеи Пейджа отлично сочетались с технологиями, не так давно разработанными уже упомянутым Себастианом Траном, профессором Университета Карнеги – Меллона, задействованным в команде DARPA Challenge. Вместе со студентами он разработал программу, соединяющую фотографии в карты, затем перешел в Стэнфорд. Google купил эту технологию и на ее основе создал Google Street View.
В это время развивалось и графическое аппаратное обеспечение. Видео и трехмерная графика занимают огромное количество памяти. Согласно закону Мура, количество транзисторов, размещаемых на кристалле интегральной схемы, удваивается каждый второй год, умножая таким образом производительность процессоров и понижая стоимость компьютерной памяти. В 2005 г. компьютерная память значительно подешевела и стала настолько доступной, что можно было создать трехмерную карту целого города и хранить ее буквально на борту машины. Дешевая память в корне поменяла ситуацию.
Тран вместе с некоторыми другими успешными разработчиками беспилотных автомобилей поняли, что реплицировать процессы человеческого восприятия и принятия решений чертовски сложно и невозможно на данном этапе. И потому они решили оставить этот путь. Когда говорят о такого рода инновациях, обычно вспоминают братьев Райт. До них люди думали, что для того, чтобы заставить машину летать, нужно повторять движения птиц. Братья Райт осознали, что для полета не нужно махать крыльями – достаточно парить.
Читать дальшеИнтервал:
Закладка:

![Джон Будро - Реинжиниринг бизнеса [Как грамотно внедрить автоматизацию и искусственный интеллект] [litres]](/books/1078415/dzhon-budro-reinzhiniring-biznesa-kak-gramotno-vned.webp)