Владимир Живетин - Системные человеческие джунгли рисков

- Название:Системные человеческие джунгли рисков
- Автор:
- Жанр:
- Издательство:Международный институт проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2013
- Город:Москва
- ISBN:978-5-98664-084-6, 978-5-905883-29-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Системные человеческие джунгли рисков краткое содержание
Человеческие джунгли обусловлены различием сущностно-личностных свойств людей, которые творят джунгли рисков и безопасности человеческой деятельности. Проблема предотвращения джунглей рисков и обеспечения безопасности обусловлена отсутствием моделей на качественном и количественном уровнях, позволяющих осуществить контроль и управление безопасностью жизнедеятельности как во внутренней среде эгосферы, так и в социальной системе.
Работа направлена на создание метода анализа системных человеческих джунглей рисков с целью реализации безопасных состояний человека.
Системные человеческие джунгли рисков - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Одним из условий самосохранения динамических систем А 1, А 2является приспосабливаемость к непрерывным изменениям внутренней и внешней сред. При формировании математической модели необходимо учитывать следующее:
– динамические системы А 1, А 2имеют структуры, включающие взаимосвязанные подсистемы;
– осуществляется учет влияния внешней среды на достижение поставленной цели;
– управленческие решения принимаются интеллектуально-энергетическими системами (подсистемы 1, 2, 4) на основе изучения и учета всей совокупности ситуационных факторов.
Требования к математической модели:
– должна содержать средства анализа изменения энергетических потоков и полей при введении различных управляющих воздействий согласно функциональным свойствам подсистем;
– должна позволять прогнозировать изменения энергетического потенциала в различные моменты времени;
– количество выходных параметров должно быть достаточным для анализа, а также оценки опасных состояний.
Математическая модель процесса формирования энергетических потоков динамической системы
Для построения уравнения функционирования динамической системы воспользуемся балансом энергетических потоков, поступающих и отдаваемых динамической системой в некоторый момент времени t [4]. Будем считать, что как сама энергия Е ( t ), формируемая динамической системой, так и потоки на входе и выходе системы непрерывны и дифференцируемы по времени необходимое число раз без специальных оговорок. Это общепринятые допущения. Под термином «поток» в дальнейшем будем понимать изменение энергии в единицу времени, то есть производная по времени.
Имеют место следующие соотношения:
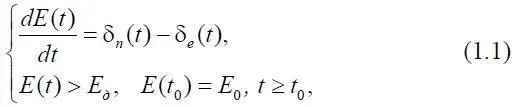
где E = E ( t ) – энергетический потенциал (энергия), имеющийся у динамической системы в данный момент времени, которым она может свободно распоряжаться; δ n = δ n ( t ) – поток поступающей энергии; δ e = δ e ( t ) – поток расходов энергии; Е 0– начальный запас энергии динамической системы; Е д – гарантийный запас энергии, ниже которого энергия динамической системы не должна опускаться, поскольку при этом она достигает критической области, в которой нарушаются функциональные свойства ее подсистем.
При этом δ n ( t ) представляют потребности системы А 1или А 2, δ e ( t ) – возможности систем А 1или А 2соответственно.
Так как математические модели процессов изменения E 1( t ) и E 2( t ), соответственно систем А 1или А 2однообразны, то ниже на примере одной из систем – А 1– рассмотрим все свойства процессов, описывающих: возможности δ e ( t ) и потребности δ n ( t ) систем.
Система (1.1) описывает баланс энергетических потоков, который следует из фундаментального закона сохранения энергии.
Поток расходов δ e ( t ) представим в виде
δ e ( t ) = δ (1) e ( t ) + δ (2) e ( t ), (1.2)
где δ ( 1) e ( t ) – поток энергии, выдаваемый во внешнюю среду; е (2) e ( t ) = δ (2,1) e ( t ) + δ ( 2, 2) e ( t ) + δ (2,3) e ( t ) + δ (2,4) e ( t ), δ (2) e ( t ) – поток расхода энергии во внутренней среде; δ (2,1) e ( t ) – расход энергии в подсистеме целеполагания (1); δ (2,2) e ( t ) – расход энергии в подсистеме целедостижения (2); δ (2,3) e ( t ) – расход энергии в подсистеме целереализации (3); δ (2,4) e ( t ) – расход энергии в подсистеме контроля (4).
Поток поступления энергии е n от социальной системы запишем так:

где δ ( 1) е ( t – τ) – поток энергии, отданный динамической системой в социальную систему в момент времени ( t – τ); p ( t – τ) – расчетная, так, например, в процентах, величина увеличения δ е ( t ), принятая в момент времени t – τ; τ – время возврата энергетического потока; 360 – условное количество дней в году.
Рассмотрим, как формируются потоки δ е и δ n , а именно с помощью каких подсистем интеллектуально-энергетической динамической системы (рис. 1.19) общества (человека). Согласно структурно-функциональным свойствам динамической системы, куда направить поток δ ( 1) е , определяет подсистема (1) целеполагания, формируя u 1. При этом формируется соответствующий поток δ (1) е = δ (1) е ( Α i , t ), свойства которого соответствуют динамической системе ( А i ) во внешней среде.
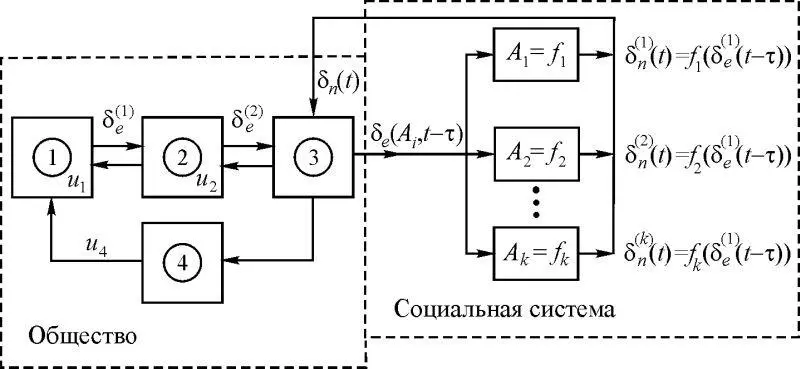
Рис. 1.19
Величину δ ( 2) е ( t ) определяет подсистема целедостижения (2).
В итоге величина потока энергии δ n ( t ) на выходе изучаемой динамической системы есть функция двух управлений u 1и u 2, т. е. δ е ( t ) = δ е ( u 1, u 2; t ). При этом динамическая система только часть энергетического потенциала может отдать во внешнюю среду, в том числе для своего развития, для формирования δ n ( t ); другая часть остается для внутреннего потребления. Необходимый баланс поддерживается и управляется подсистемой целедостижения (2).
Анализ такого баланса осуществляется с помощью системы контроля, формируя допустимые и критические значения энергий и энергетических потоков в подсистеме (3) целереализации. При этом формируется управление u 4, которое играет важную роль в подсистемах (1) и (2) при формировании u 1= u 1( u 4), u 2= u 2( u 4).
С целью упрощения анализа синтезируемой динамической системы, описываемой системой (1.1), введем параметр z D , характеризующий динамику системы. Этот параметр связан с управлением u 2, т. е. τ D = τ D ( u 2). Смысл параметра τ D – регулировать поток расхода энергии E ( t ), созданной динамической системой в данный момент времени. При этом имеем
E ( t ) = τ D δ e ( t ). (1.4)
Например, динамическая система имеет 100 единиц энергии. Пусть δ e = 10 единиц в единицу времени. Эта величина характеризует производительность системы в социальной системе δ (1) e и во внутренней системе общества. Если τ D = 10 единиц времени, то это означает, что динамическая система за 10 единиц времени может израсходовать весь свой энергетический потенциал, если поток поступления δ n = 0 за все это время, что обусловливает энергетическую смерть динамической системы. Для человека δ n = Ė ч в х = ( Ė ч n , Ė ч в ода , Ė ч в озд ), и, если отсутствует поток пищи Ė ч n , или поток воды Ė ч вода , или поток воздуха Ė ч в озд , наступает его энергетическая смерть. Существуют временные интервалы непоступления пищи, воды, воздуха – критические значения для человека как динамической системы.
Читать дальшеИнтервал:
Закладка: