Борис Шустов - Астероидно-кометная опасность: вчера, сегодня, завтра

- Название:Астероидно-кометная опасность: вчера, сегодня, завтра
- Автор:
- Жанр:
- Издательство:Физматлит
- Год:2010
- Город:Москва
- ISBN:978-5-9221-1241-3
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Борис Шустов - Астероидно-кометная опасность: вчера, сегодня, завтра краткое содержание
Проблема астероидно-кометной опасности, т. е. угрозы столкновения Земли с малыми телами Солнечной системы, осознается в наши дни как комплексная глобальная проблема, стоящая перед человечеством. В этой коллективной монографии впервые обобщены данные по всем аспектам проблемы. Рассмотрены современные представления о свойствах малых тел Солнечной системы и эволюции их ансамбля, проблемы обнаружения и мониторинга малых тел. Обсуждаются вопросы оценки уровня угрозы и возможных последствий падения тел на Землю, способы защиты и уменьшения ущерба, а также пути развития внутрироссийского и международного сотрудничества по этой глобальной проблеме.
Книга рассчитана на широкий круг читателей. Научные работники, преподаватели, аспиранты и студенты различных специальностей, включая, прежде всего, астрономию, физику, науки о Земле, технические специалисты из сферы космической деятельности и, конечно, читатели, интересующиеся наукой, найдут для себя много интересного.
Астероидно-кометная опасность: вчера, сегодня, завтра - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
ζ = |V | sin θ Δt, (7.11)
где θ — угол между направлением гелиоцентрической скорости Земли и осью η.
В отличие от координаты ζ координата ξ не меняется с течением времени, поскольку движение происходит в параллельных плоскостях. Если пересечение с плоскостью цели рассматривать на границе сферы действия планеты, то координата ξ равна прицельному расстоянию b (рис. 7.1). Если пересечение рассматривается внутри сферы действия планеты вблизи перигея гиперболы, то ξ равно минимальному расстоянию q от гиперболы до центра Земли.
7.5. Эллипс рассеяния в плоскости цели. Оценка вероятности столкновения
Только один виртуальный астероид пересекает плоскость цели в момент, когда Земля находится у одного конца кратчайшего отрезка между орбитами. Другие виртуальные астероиды, движущиеся вдоль номинальной траектории, пересекают плоскость цели раньше или позже, чем это нужно для достижения минимального расстояния между орбитами, и соответствующие точки пересечения имеют различные значения координаты ζ. Очевидно, что  есть расстояние, на котором виртуальный астероид пересекает плоскость цели от центра Земли. В то же время это есть минимальное расстояние от Земли, на котором он проходит мимо нее в данном сближении. Это следует из того, что его геоцентрическая скорость нормальна к геоцентрическому радиусу.
есть расстояние, на котором виртуальный астероид пересекает плоскость цели от центра Земли. В то же время это есть минимальное расстояние от Земли, на котором он проходит мимо нее в данном сближении. Это следует из того, что его геоцентрическая скорость нормальна к геоцентрическому радиусу.
Таким образом, цепочка виртуальных астероидов, вытянувшихся вдоль номинальной орбиты, проектируется на плоскость цели в прямую, параллельную оси ζ, причем виртуальный астероид, соответствующий центру доверительного эллипсоида в начальную эпоху t 0, пересекает плоскость цели в точке, расположенной, вообще говоря, выше или ниже оси ξ. Область вокруг этой точки на плоскости ξ — ζ является отображением области возможных начальных условий движения на плоскость цели. Поскольку мы с самого начала предположили линейный характер задачи, можно утверждать, что область начальных значений, ограниченная в эпоху t 0доверительным эллипсоидом, отобразится на плоскость ξ — ζ в часть плоскости, ограниченную эллипсом с центром в точке, соответствующей центру доверительного эллипсоида. Задача сводится к тому, чтобы найти координаты центра эллипса на плоскости ξ — ζ и его полуоси и оценить расположение эллипса рассеяния относительно образа Земли на этой плоскости.
В линейном приближении эта задача решается достаточно просто. В общем виде ход решения задачи можно описать следующим образом.
Координаты точки ξ, ζ на плоскости цели (см. формулу (7.10)) являются функциями F 1и F 2параметров орбиты (элементов или координат и скоростей в начальную эпоху), что в векторном виде можно записать как
L = F(E),
где L — двумерный вектор с компонентами ξ, ζ, а E — вектор параметров орбиты.
В рамках линейного приближения матрица ковариации D вектора L связана с матрицей ковариации вектора E известным соотношением [Эльясберг, 1976]:
D = σ 2( d F d E)Q -1( d F d E) T, (7.12)
где d F/ d E — частные производные F по параметрам E. Величины σ и Q -1известны, поскольку они являются соответственно средней квадратичной погрешностью наблюдений, использованных при определении орбиты тела, и обратной матрицей нормальной системы уравнений (см. раздел 7.1).
Компоненты вектора L и частные производные в момент t (изохронные производные) находятся численным интегрированием уравнений движения в прямоугольных координатах с последующим преобразованием их в координаты ξ, η, ζ и численным интегрированием уравнений, определяющих значения производных (так называемых уравнений в вариациях) при заданных начальных условиях движения. Таким образом, на момент сближения астероида, соответствующего номинальному решению, с Землей (или со сферой ее действия) оказываются известными координаты центра эллипса в плоскости цели и его полуоси, определяемые как

где D ii — диагональные элементы матрицы ковариации D, a 1= a ξ — длина малой полуоси эллипса рассеяния, a 2= a ζ — длина большой полуоси. Заметим, что формула (7.13) определяет полуоси эллипса, соответствующие области неопределенности начальных условий внутри эллипсоида равных плотностей вероятности. Чтобы получить полуоси доверительного эллипса на плоскости цели, надо a ξи a ζумножить на 3.
Возможны следующие три случая взаимного расположения Земли и эллипса на плоскости цели: а) эллипс расположен на некотором расстоянии от окружности с радиусом, равным радиусу Земли (радиусу захвата Земли, если вычисления доверительного эллипса производятся на границе сферы действия Земли) (рис. 7.3 а ), что практически исключает возможность столкновения астероида с Землей;
б) кружок с радиусом, равным радиусу Земли (или радиусу захвата), находится внутри эллипса (рис. 7.3 б ). Вероятность столкновения может быть рассчитана исходя из отношения площади кружка к площади, ограниченной эллипсом. Для повышения точности прогноза можно учесть неодинаковую вероятность попадания виртуальных астероидов в различные точки области, ограниченной эллипсом;
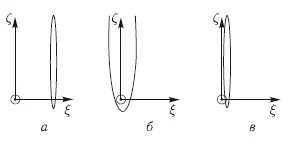
Рис. 7.3. Возможные взаимные расположения эллипсов рассеяния и Земли в плоскости цели
в) площадь, ограниченная эллипсом, частично покрывает Землю (рис. 7.3 в ). Этот случай практически не отличается от предыдущего. Вероятность столкновения рассчитывается с учетом отношения перекрывающейся области ко всей площади, ограниченной эллипсом.
Более подробно расчет вероятности столкновения здесь не рассматривается, так как во всех случаях, когда возникает реальная угроза столкновения, следует предпринять дополнительные исследования, учитывающие возможный нелинейный характер задачи.
Нелинейный характер задача может иметь по многим причинам. Доверительный эллипсоид уже в эпоху t 0может недостаточно хорошо описывать область возможных начальных условий, поскольку само распределение ошибок наблюдений может не подчиняться закону Гаусса. Чем дальше от эпохи t 0, тем больше нарастает нелинейность, и применение формулы (7.8) становится незаконным. Проекция доверительного эллипсоида на плоскость цели в момент t сближения с Землей, отдаленный от t 0на десятилетия, вытягивается в очень узкую область, которая к тому же искривляется в соответствии с кривизной земной орбиты. По всем этим причинам линейный анализ задачи становится неадекватным и требуется применение более тонких методов анализа. К настоящему времени предложено два таких метода: метод Монте-Карло и метод линии вариации.
Читать дальшеИнтервал:
Закладка: