Мария Победоносцева - Организация современной информационной образовательной среды. Методическое пособие

- Название:Организация современной информационной образовательной среды. Методическое пособие
- Автор:
- Жанр:
- Издательство:ЛитагентПрометей86f6ded2-1642-11e4-a844-0025905a069a
- Год:2016
- Город:Москва
- ISBN:978-5-9907986-4-9
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Мария Победоносцева - Организация современной информационной образовательной среды. Методическое пособие краткое содержание
Настоящее издание содержит материалы образовательной программы высшего образования «Организация современной информационной образовательной среды», разработанные в соответствии с требованиями ФГОС ВО по направлению подготовки 44.04.01 «Педагогическое образование» (квалификация (степень) «магистр»), утвержденного приказом Министерства образования и науки Российский Федерации от 21 ноября 2014 года, № 1505. Данная программа реализуется с 2015 года на математическом факультете МПГУ кафедрой теории и методики обучения информатике.
Для разработчиков основной профессиональной образовательной программы высшего образования по данному направлению подготовки, преподавателей, магистрантов и др.
Организация современной информационной образовательной среды. Методическое пособие - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Общая трудоемкость дисциплины составляет 3 зачетных единицы (108 учебных часов, из них 24 аудиторных часов).
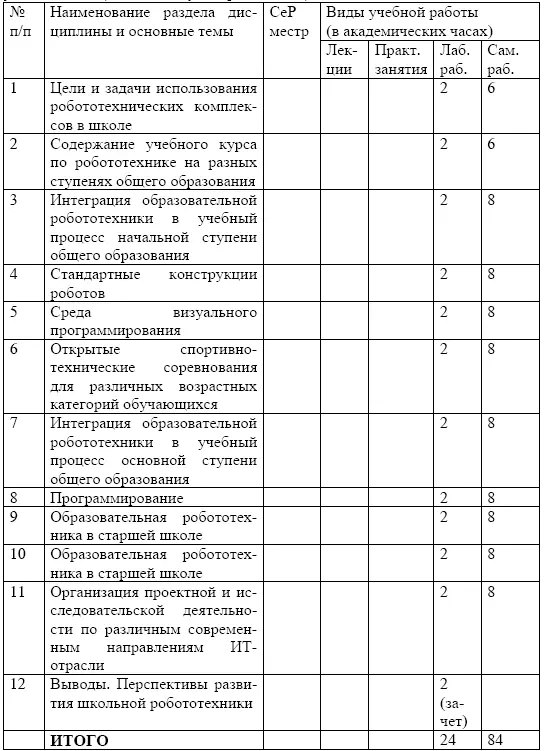
Цели и задачи использования робототехнических комплексов в школе
Цели и задачи использования робототехнических комплексов в школе.
Формирование инженерной культуры и навыков прикладного программирования посредством междисциплинарной интеграции информатики, физики и технологии на основе использования робототехнических комплексов. Место образовательной робототехники в учебном процессе для разных возрастных категорий обучающихся в урочной и внеурочной деятельности в соответствии с ФГОС общего образования.
Содержание учебного курса по робототехнике на разных ступенях общего образования
Общие подходы к формированию содержания учебного курса по робототехнике на разных ступенях общего образования. Дидактические принципы отбора содержания учебного курса по робототехнике для интеграции с предметами естественно-научного и технологического направления (информатике, физике, технологии).
Виды робототехнических конструкторов: состав наборов, их образовательные возможности.
Программные среды для программирования роботов – RoboLab, NXT, EV3, RobotC, их сравнение, анализ, область применение программных сред. Раскрытие метапредметных связей робототехники и предметов естественнонаучного и технологического направления (информатики, физики, технологии и предпринимательства).
Интеграция образовательной робототехники в учебный процесс начальной ступени общего образования
Практические приемы внедрения леготехнологий в деятельность образовательного учреждения. Возможные способы интеграции образовательной робототехники в учебный процесс начальной школы. Методы и приемы формирования универсальных учебных действий у учащихся, а также планируемые результаты в соответствии с ФГОС НОО. Тематическое и поурочное планирование учебной деятельности. Использование сетевых возможностей организации и проведения практических занятий по робототехнике.
Стандартные конструкции роботов
Первые модели роботов. Стандартные конструкции роботов (базовая модель робота, модели одномоторной и двухмоторной тележек, «шагающих» роботов).
Интерфейс NXT и EV3. Программирование робота с использованием блока NXT или EV3. Датчики: подключение, настройка, возможности применения. Практическая часть:
1. Сборка моделей роботов с механическим управлением (одномоторная и двухмоторная тележка). Программирование робота с использованием робота NXT или EV3 (двухмоторная тележка).
2. Датчики NXT или EV3: подключение, настройка, возможности применения.
Среда визуального программирования
Среда визуального программирования. ознакомление с принципами работы датчиков NXT или EV3, их параметрами и применением. Изучается интерфейс программы, ее основные инструменты и команды, принципы программирования и язык NXT или EV3.
Создание робота, программирование его движения. Проводится подготовка к первым соревнованиям для самых юных робототехников. С этой целью учитель моделирует условия состязаний на уроках. Предусматривается также свободная сборка, сборка по технологической карте или образцу.
Открытые спортивно-технические соревнования для различных возрастных категорий обучающихся
Открытые спортивно-технические соревнования – как основной метод обучения инженерному творчеству. Виды и регламенты соревнований. Практическая часть:
Подготовка к соревнованиям: создание 3Б-модели, технической документации, подготовка технического отчета; техническая презентация; коммерческая презентация; презентация команды; создание интернет-сайта проекта; оформление выставочной экспозиции команды и т. д.
Интеграция образовательной робототехники в учебный процесс основной ступени общего образования
Уроки по робототехнике в основной школе.
1. Программирование в NXT или EV3. Интерфейс программной среды. Использование основной и полной палитры NXT или EV3.
2. Создание модели с одним, двумя и тремя датчиками (сборка модели, написание программы, тестирование и отладка робота).
3. Решение стандартных задач: движение по черной линии, траектория с перекрестками, движение вдоль стенки, преодоление лабиринта, транспортировка шариков, сортировка предметов и др.
4. Bluetoth. Удаленное управление роботом.
Практическая часть:
1. Программирование в NXT или EV3: модели с одним, двумя и тремя датчиками (сборка модели, написание программы, тестирование и отладка робота).
2. Решение стандартных задач: движение по черной линии, траектория с перекрестками.
3. Решение стандартных задач: движение вдоль стенки, преодоление лабиринта.
4. Решение стандартных задач: транспортировка шариков, сортировка предметов.
5. Bluetooth. Удаленное управление роботом.
Программирование
1. Программирование в Robolab. Режим «Администратор». Соединение с NXT или EV3.
2. Режим «Программист». Команды действия. Команды ожидания. Управляющие структуры. Модификаторы. Контейнеры. Визуализация руководства пользователя.
Практическая часть:
1. Настройка МК NXT или EV3 для работы с Robolab 2.9. Режим «Администратор».
2. Знакомство с интерфейсом среды Robolab в режиме «Программист». Базовые команды управления роботом.
3. Точное позиционирование робота.
4. Ориентирование в пространстве. Программирование повторяющихся действий.
5. Объезд препятствий и транспортировка предметов. Движение по траектории.
Образовательная робототехника в старшей школе
1. Обзор средств программирования LegoMindstorms на базе языка С. Знакомство с языком программирования RobotC. Скачивание демо-версии с сайта разработчика, установка, настройка. Основы языка С: константы, переменные, структуры языка.
2. Программирование в RobotC. Структура программы. Управление моторами. Настройка датчиков. Задержки и таймеры. Управление задачами. Дополнительные структуры языка для программирования LegoMindstorms.
Образовательная робототехника в старшей школе
1. Использование памяти для программирования поведения робота. Управление роботом.
2. Скачивание и установка программы RobotC Знакомство с меню, настройками программы и помощником по конфигурированию робота. Знакомство с системой помощи.
3. Сборка базовой модели робота (два мотора, датчик касания, два датчика света). Работа с моторами – движение вперед, назад, вращение на месте, движение по кругу. Движение до препятствия и отъезд от него. Написание программы движения по черной линии с одним или двумя датчиками света.
Читать дальшеИнтервал:
Закладка: