Борис Ломов - Психическая регуляция деятельности. Избранные труды

- Название:Психическая регуляция деятельности. Избранные труды
- Автор:
- Жанр:
- Издательство:Array Литагент «Когито-Центр»
- Год:2006
- Город:Москва
- ISBN:5-9270-0099-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Борис Ломов - Психическая регуляция деятельности. Избранные труды краткое содержание
Психическая регуляция деятельности. Избранные труды - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
В этих условиях, поскольку нет изменения скорости, тормозящие проприоцептивные сигналы обратной связи, по-видимому, очень слабы для того, чтобы повлиять на режим движения. Исходя из наших данных, можно предположить, что они начинают играть какую-то роль в управлении движением только тогда, когда скорость достигает 15–17 град/сек, и этой величиной ограничивают скорость скользящих движений.
После исчезновения вызываемого стимулом зрительного ощущения (в силу местной адаптации) прекращается поступление управляющих сигналов на исполнительные механизмы, система останавливается, а затем под действием упругих сил возвращается в исходное положение.
Для пояснения предложений схемы рассмотрим простейший вариант следящей системы, работающей на основе принципа отклонения (рисунок 1.5).
Система состоит из оптического устройства (7), светочувствительных датчиков (2) и поворотных двигателей-моторов (3). Датчики-фотоэлементы расположены так, что каждый из них закрывает одну половину «поля зрения» и может приводить в движение только один двигатель, отклоняющий оптическую систему в определенном направлении. Такая следящая система работает следующим образом. Если свет от внешнего источника попадает, например, на левый датчик, в цепи возникает электрический ток, приводящий в движение правый мотор. Если свет падает на правый датчик, в движение приходит левый мотор. Моторы включены в схему таким образом, что при засветке одного из фотоэлементов оптическая система будет поворачиваться в сторону источника света до тех пор, пока свет не упадет на другой фотоэлемент; тогда в действие придет другой мотор, т. е. возникнет сила, противодействующая действию первого мотора, и оптическая система остановится.
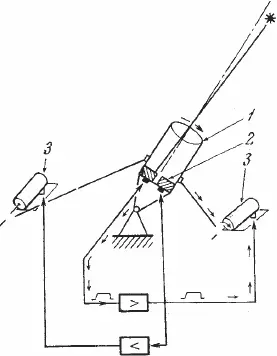
Рис. 1.5. Иллюстративная схема следящей системы
1 – корпус телескопа; 2 – фотоэлементы; 3 – электромоторы
Если представить такое сравнительно простое следящее устройство в качестве аналога глазодвигательной системы, можно видеть, что оно будет выполнять некоторые элементарные функции, характерные для глазодвигательной системы: слежение за движущимся объектом; смену точек фиксации при резком перемещении стимула из центрального положения, где он освещал оба фотоэлемента, на периферию; движение оптической системы в том случае, когда стимул стабилизирован относительно нее (в этом последнем случае движение будет происходить до тех пор, пока система не дойдет до крайнего положения, либо пока не прекратится действие стимула).
Некоторое усложнение описанного варианта следящей системы, а именно увеличение числа фотоэлементов и включение отрицательной обратной связи, ограничивающей развиваемую системой скорость (аналог проприоцепции), позволяет еще более полно описать работу глазодвигательной системы. Усложненный вариант следящей системы представлен на рисунке 1.6.
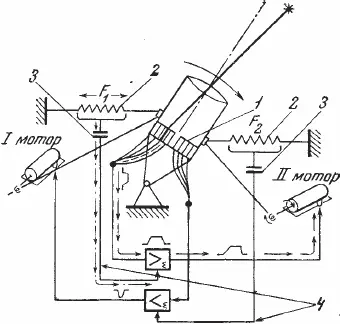
Рис. 1.6. Вариант следящей системы
1 – упругие элементы, возвращающие систему в нейтральное положение; 2 – мозаика фотоэлементов; 3 – элементы выделения ускорения системы; 4 – цепь отрицательной обратной связи
Несколько фотоэлементов включены в цепь таким образом, что скорость электромотора будет тем больше, чем дальше от центра расположен возбуждаемый фотоэлемент.
Подобная система работает следующим образом. При возбуждении одного или нескольких «периферических» фотоэлементов включается первый электромотор (1). При этом в силу последовательного подключения новых элементов, расположенных между первоначально возбужденным (периферическим) фотоэлементом и центральным, скорость движения будет прогрессивно нарастать. Однако через некоторое достаточно короткое время сигнал от скоростного демпфера (3) (аналог проприоцептивной обратной связи) включает в действие второй мотор (2). Это ограничивает скорость поворота оптической системы. Последовательное приближение проекции светового стимула к центру приводит к уменьшению скорости поворота. Последний этап работы всей системы представляет собой затухающий колебательный процесс. В силу инерционности передачи сигнала от возбуждаемых фотоэлементов оптическая система поворачивается на угол, больший, чем требуется для точной настройки; в результате возникает новый сигнал и система начинает перемещаться в противоположном направлении, компенсируя возникающее рассогласование. Режим затухающего колебания можно наблюдать в случае скачков глаза при больших угловых расстояниях между начальной и конечной точками фиксации.
Предложенная модель, как нам представляется, может объяснить многие факты, выявленные при изучении движений глаз, в том числе и те, которые получены в исследованиях движений глаз при восприятии движущихся объектов. Как известно, после того как произошел скачок, обеспечивающий совмещение фовеальной области с движущимся стимулом, прослеживание начинается практически мгновенно; заметного латентного периода между концом скачка и началом прослеживающего движения глаза нет [119].
Сторонники концепции программированного движения, объясняя этот факт, вынуждены утверждать, что подготовка прослеживания осуществляется еще до скачка. С точки зрения предлагаемой нами концепции глазодвигательного механизма как следящей системы, этот факт может быть объяснен проще. Он, естественно, вытекает из принципов работы следящей системы. Сигнал рассогласования, вызванный движущимся стимулом, приводит глазодвигательную систему в движение с увеличивающейся скоростью (скачок), но после совмещения центральной области со стимулом скорость движения глаза подстраивается к скорости стимула, поскольку только при этом условии возможно сохранение достигнутого совмещения. Глазодвигательная система работает таким образом, чтобы проекция стимула находилась в центральной области сетчатки. В результате следящее движение является относительно плавным, возникающие сигналы рассогласования тотчас же компенсируются, что соответствует некоторым отклонениям (зубцам) на регистрируемой общей кривой относительно плавного движения.
С гипотезой «следящей системы» согласуется также и тот факт, что в процессе прослеживания всегда имеет место некоторое отставание центральной области сетчатки (соответственно, зрительной оси) от движущегося стимула.
Прослеживание «убегающего стимула» (как, например, в опытах Ярбуса с зеркальцем, укрепленным на присоске [269]) имеет скачкообразный характер. Скачки наблюдаются также при прослеживании стимула, движущегося с ускорением. В соответствии с предложенной гипотезой такой характер движений обусловлен управляющим воздействием тормозящих проприоцептивных сигналов, возникающих при ускорениях движения глаза.
Читать дальшеИнтервал:
Закладка: