Борис Ломов - Психическая регуляция деятельности. Избранные труды

- Название:Психическая регуляция деятельности. Избранные труды
- Автор:
- Жанр:
- Издательство:Array Литагент «Когито-Центр»
- Год:2006
- Город:Москва
- ISBN:5-9270-0099-1
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Борис Ломов - Психическая регуляция деятельности. Избранные труды краткое содержание
Психическая регуляция деятельности. Избранные труды - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Эксперименты показали, что при переводе взгляда на точку, находящуюся на расстоянии от центра на 10°, угол поворота составляет 9,3–9,5°, т. е. угол расхождения –0,5–0,7°. Для точек, отстоящих от центра на 20 и 40°, расхождение составляет 1,2 и 2,5° соответственно.
Величина расхождения несколько различна для разных направлений отклонения глаза. Так, при направлении к носу (а также книзу) она несколько меньше, чем при направлении к виску (а также кверху). Возможно, отмеченная асимметрия возникает в силу того, что нейтральная позиция глаза характеризуется таким положением зрительных осей, при котором они несколько сведены и направлены вниз. В силу этого для поворота глаз к носу (и вниз) требуется меньшее мышечное усилие по сравнению с другими направлениями.
Если предложенная для фиксации точка является частью какой-либо фигуры, то в зависимости от направления прилежащих линий отклонение зрительной оси от заданного направления может оказаться то большим, то меньшим. Так, при предъявлении четырех изолированных точек-стимулов, расположенных в вершинах квадрата со стороной 40°, отклонение зрительной оси составляет 2–2,5°. Если эти точки соединены прямыми линиями, образующими квадрат, отклонение увеличивается до 3–3,5°. При фиксации вершин косоугольного ромба отклонение для острых углов оказывается большим, чем для тупых (рисунок 1.7).
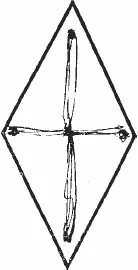
Рис. 1.7. Запись фиксации глаз при фиксации вершин ромба
Таким образом, экспериментальные данные соответствуют тем следствиям, которые вытекают из гипотезы «следящей системы».
До сих пор мы рассмотрели лишь качественные характеристики следящей системы, управляющей движениями глаза. Однако записи движений глаз, полученные при решении некоторых экспериментальных задач, позволяют судить и о количественных характеристиках некоторых ее параметров в терминах теорий автоматического регулирования.
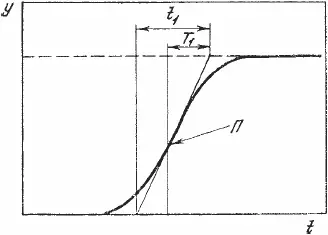
Рис. 1.8. Кривая переходного процесса для единичного скачка апериодичной системы второго порядка
П – точка перегиба; t 1– время нарастания
Для оценки этих параметров можно воспользоваться кривой переходного процесса, получаемой при скачкообразном изменении входного сигнала. Очевидно, для зрительной системы такой режим будет соответствовать смене точек фиксации. Большинство скачков, лежащих в пределах 20°, может апроксимироваться кривой (рисунок 1.8), что с достаточной степенью точности может характеризовать систему по цепи прямой связи как апериодическую второго порядка. Динамика такой системы может быть описана дифференциальным уравнением второго порядка:
где Y(t) – выходная переменная; Х(t) – входная переменная.
По графику переходного процесса (см. рисунок 1. 8) определяются величины T 1и t 1и по ним определяются величины T 1и T 2.
В другом виде это уравнение [4] может быть записано так:

при этом T 3T 4= T 2 2; T 3/T 4= T 1
Этот вид дифференциального уравнения удобен тем, что величины Т 3 и Т 4 выступают явственно в его решении, хотя на графике переходного процесса они не очевидны. Математическое выражение переходного процесса такой системы можно записать так:
Полученное уравнение представляет сумму двух экспонент с постоянным временем Т 3 и Т 4 .
Амплитудно-частотные соотношения в системе удобно определять, используя понятия передаточной функции системы. Передаточная функция прямой цепи нашей системы (отношение преобразования Лапласа от выходной переменной к преобразованиям Лапласа от входной переменной) будет
где T=T 2 – постоянная времени. x =Т 1/2Т – относительный коэффициент демпфирования. Полагая обратную связь равной 1, структурную схему системы можно представить на рисунке 1.9. В этом случае передаточная функция всей системы
где S – оператор Лапласа. Вместе с тем, оценивая переходные характеристики системы для различных углов предъявления стимула, можно заметить, что максимальная скорость скачков (касательная в точке перегиба характеристики) будет увеличиваться с возрастанием их амплитуды почти линейно. Такая закономерность, вероятно, обусловлена тем, что следящая система глазодвигательного аппарата, кроме позиционной обратной связи, включает в себя регулирование по производной (рисунок 1.10), т. е. по скорости. Передаточная функция системы в этом случае будет определяться как
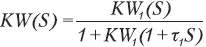
где КW 1– передаточная функция прямой цепи без скоростной обратной связи; t 1S – передаточная функция скоростной обратной связи (дифференцирующее звено).
Рис. 1.9. Структурная схема следящей системы с единичной обратной связью Рис. 1.10. Структурная схема следящей системы с цепью регулирования по производной
Такая цепь с регулированием скорости изображена на схеме (см. рисунок 1.6) в виде дифференцирующей цепочки, включенной в цепь обратной связи. Увеличение скорости регулирования системы может быть объяснено тем, что при возрастании отклонения X производная dx/dt и само отклонение имеют одинаковые знаки. Их сложение увеличивает воздействие регулятора Y на объект, направленное на уменьшение отклонения X. Таким образом, наличие производной в законе регулирования форсирует действие регулятора на участке возрастания отклонения регулируемой величины. Иначе говоря, для больших значений входных сигналов будут получаться большие максимальные скорости поворотов глаза. Вместе с тем при выходе глазодвигательной системы на торможение знак производной изменится и будет происходить вычитание сигнала по скорости из сигнала по отклонению.
Такая система регулирования по скорости выполняет фактически и функцию механического опережения («прогнозирования»), поскольку определяет тенденцию изменения входного сигнала и вносит соответствующую поправку. Последняя компенсирует инерционное запаздывание всей системы и увеличивает точность регулирования. В реальном механизме глазодвигательной системы такое регулирование, по-видимому, могут осуществлять проприорецепторы глазных мышц. В этом случае сигналы о скорости растяжения мышцы могут подаваться либо на мотонейроны той же мышцы, с которой они были получены (положительная обратная связь), либо на мышцы-антагонисты в противоположной фазе (отрицательная обратная связь).
Читать дальшеИнтервал:
Закладка: