Авиация и космонавтика 2005 08

- Название:Авиация и космонавтика 2005 08
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2005
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Авиация и космонавтика 2005 08 краткое содержание
Авиация и космонавтика 2005 08 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Создание новой ракетной системы было задано Приказом МАП от 29 апреля 1957 года, оговаривавшим разработку на базе новейшей самолетной РЛС «Рубин-1» системы управления и наведения «Рубикон» как для ракет нового типа, так и для КС-1. Новая система отличалась более рациональной схемой с использованием активного самонаведения ракет и единой РЛС (вместо двух на Ту- 16КС). По наименованию системы будущая ракета, ведущая свое начало от КС, получила шифр КСР. Ее разработкой занималось ОКБ-2-155 под руководством А.Я.Березняка. Туполевское ОКБ-256 переоборудовало два Ту-16, оснастив их системой «Рубикон». Испытания машин – одной с ракетами КС-1, другой – с КСР, прошли в Крыму летом и осенью 1958 года. Были выполнены 22 полета и 11 пусков, в том числе 6 – по корабельным целям с дальности 90-96 км. Четыре ракеты попали в цель, однако имелись недостатки системы наведения и управляемости самой ракеты на траектории.
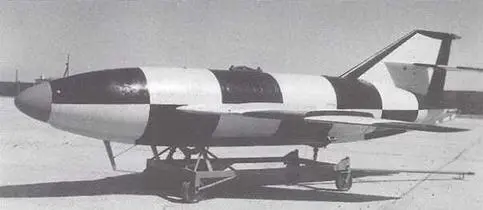
Рокето КСР-2 во время испытаний
Ракета КСР была по схеме сходна с КС-1 и конструктивно включала подобные агрегаты – крыло и оперение стреловидностью 55 град., цельнометаллический сигарообразный фюзеляж, однако за счет перехода на ЖРД и отсутствия воздухозаборника имела существенно меньший мидель (диаметр фюзеляжа составлял менее метра, против 1,6 м у КС-1). Крыло, как и у «Кометы» береговой обороны, могло складываться для компактности при хранении и перевозке.
Сконструированный КБ-300 A.M. Исаева ЖРД отличался простотой устройства и небольшим весом (практически он представлял собой камеру сгорания с соплом и системой подачи и был почти в 20 раз легче турбореактивного двигателя той же тяги). ЖРД имел два режима работы – стартовый и маршевый, а его запуск осуществлялся подачей компонентов топлива, самовоспламенявшихся при смешивании.
БЧ ракеты заимствовали у создававшейся параллельно К-10С. Система наведения включала бортовую радиолокационную аппаратуру К-1MP и автопилот АПК-5Д. Испытания продемонстрировали преимущество новой системы: активная радиолокационная ГСН захватывала цель уже на подвеске под носителем, управление ею было упрощено и не требоволо специального члена экипажа – оператора, ракета могла использоваться и по наземным родиолокационно-контрастным целям, выделяющимся на фоне местности – крупным промышленным строениям, мостам, плотинам, железнодорожным узлом и т.п. Автономность наведения позволяла носителю отворачивать с боевого курса сразу после пуска, избегая опасности перехвата. К выгодам отнесли также размещение ракет но подкрыльевой подвеске (в отличие от К-10С), позволявшее нести в грузоотсеке бомбы и мины.
Постановлением правительства от 22 августа 1959 года задавалась разработка на базе полученных результатов ракетной системы К-16, включавшей носитель Ту-16, систему управления «Рубикон» (разработчик – ОКБ-283) и ракеты КСР-2, предназначавшейся для поражения морских и наземных родиолокационно-контрастных целей. Серийный самолет Ту- 16КС (№7203608) прошел переоборудование в мае-июле 1960 года по образцу Ту-16КСР-2. Он оснащался РЛС «Рубин-1» и держателями ракет БД-245. Сама ракето получила радиолокационную ГСН типа КС-2М и автопилот АП-72-4; ее горизонтальное оперение с целью повышения устойчивости и управляемости на околозвуковых скоростях перенесли на фюзеляж, киль получил большую стреловидность, а зеркало антенны увеличили, установив новый удлиненный носовой обтекатель, по диаметру близкий фюзеляжу.
В ходе испытаний пуски выполнялись с высот 4-10 км на скорости 700-800 км/ч. Радиус действия ракетоносца с двумя КСР-2 составлял 1850 км (добиваясь заданных характеристик, само это понятие «подкорректировали», увеличив радиус действия самолета на дальность пуска ракет). Особо отмечалась простота подготовки системы к пуску, позволявшая штурману уложиться при выполнении предстартового контроля менее чем в одну минуту.
Постановлением Совмина от 30 декабря 1961 года ракетная система К-16 была принята на вооружение АВМФ и ДА. В следующем году ремонтными авиапредприятиями началось переоборудование Ту-16КС и бомбардировщиков Ту-16А (у последних при этом сохранялось и бомбардировочное вооружение) в вариант Ту-16КСР-2. Самолеты оснащались РЛС «Рубин-1 К», автопилотом АП- 6Е и держателями БД-352. С ракетоносцев Ту-16КС снималась гермокабина оператора с комплектом РЛС наведения К-1М, навигационно-бом- бардировочная РЛС РБП-4, держатели БД-187 и вся соответствующая электроарматура (позже, с целью расширения боевых возможностей, их дорабатывали в вариант Ту-16КСР- 2А с размещением бомбодержателей в грузоотсеке). У бомбардировщиков Ту-16А в ходе переделки усиливали крыло под монтаж БД-352, а выпуск закрылков ограничивали 25 град, выполняя в них вырезы под киль ракеты.
Всего переоборудовали 50 Ту-16КС в Ту-16КСР-2 и 155 Ту-16А в Ту- 16КСР-2А. Часть их получила станции индивидуальной и групповой защиты от радиотехнических средств СПС-5 «Фасоль» и СПС-100 «Резеда».
Практически в то же время, когда состоялось и решение по комплексу К-16, Постановлением СМ от 20 июля 1957 года и Приказом МАП от 31 июля 1957 года начались работы по созданию системы К-11 с ракетой КСР-11. Она предназначалась для уничтожения наземных и корабельных радиотехнических средств ПВО: РЛС обнаружения, управления огнем и наведения зенитных ракет. Самолетная станция радиолокационной разведки и целеуказания «Рица» была подготовлена к концу 1959 года. Для ее размещения снималась носовая пушечная установка Ту-16 и ее прицел, само пеленгоционноя антенна монтировалась в носу на переплете фонаря штурмана. Аппаратура «Рицы» позволяла обнаруживать в передней полусфере работающие РЛС и определять их тип, вычисляя координаты по азимуту и дальности и вводя данные в ГСН ракеты, а также осуществляя вывод носителя в точку пуска.
Ракета КСР-11 отличалась от КСР-2 установкой специальной ГСН – пассивного радиолокационного координатора цели 2ПРГ-Ю, размещенного под удлиненным обтекателем. Управление ракетой после целеуказания и пуска также полностью осуществлялось ГСН, освобождая носитель в маневре. В системе управления КСР-11 закладывался режим пролонгации («памяти»), сохранявший направление полета на цель, даже если противник обнаруживал атаку и выключал РЛС.
Казанским авиазаводом к концу 1959 года по образцу Ту-16К-11 были переоборудованы два самолета. Этап испытаний Главного Конструктора начался в Жуковском 12 февраля 1960 года. После двух лет испытаний и доводки система К-11 была принята на вооружение (ПСМ от 13 апреля 1962 года). Дальность обнаружения работающих РЛС составляла 270- 350 км, пуск мог выполняться со 160- 170 км. Радиус действия комплекса Ту-16К-11 с одной ракетой достигал 2000 км, а вероятность поражения оценивалась достаточно высоко – 0,8-0,9.
Читать дальшеИнтервал:
Закладка: