Авиация и время 2009 02

- Название:Авиация и время 2009 02
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:2009
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Авиация и время 2009 02 краткое содержание
Авиация и время 2009 02 - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
Достижению хороших ВПХ способствовала и механизация крыла, подвижные консоли которого были оснащены двухщелевыми четырехсекционными закрылками, трехсекционными предкрылками по всему размаху и интерцепторами. На передней кромке неподвижного центроплана применили щитки Крюгера, которые при выпуске поворачивались вперед-вниз, увеличивая кривизну профиля. Центроплан имел значительную стреловидность по передней кромке и на малых скоростях создавал небольшую подъемную силу. Но при увеличении стреловидности крыла доля создаваемой им подъемной силы относительно всего крыла возрастала, что компенсировало смещение назад аэродинамического фокуса и упрощало балансировку самолета.



Передняя и левая основная опоры шасси «Торнадо»


Зона кабины экипажа «Торнадо» IDS и правый воздухозаборник
Для обеспечения скоростного полета на предельно малой высоте с огибанием рельефа местности потребовалось разработать специальную систему, которая объединяла в единый комплекс несколько подсистем, ответственных за навигацию и управление самолетом. Предполагалось, что в таких сложных условиях полет будет происходить в автоматическом режиме, что потребовало разработки компьютеризированной электродистанционной системы управления (ЭДСУ). На тот момент эта идея была уже не нова. Элементы аналоговой ЭДСУ применялись еще на британском стратегическом бомбардировщике Avro Vulcan и канадском перехватчике Avro CF-105 Arrow. Сверхзвуковой пассажирский самолет Concorde уже имел полноценную аналоговую ЭДСУ. Система автоматического отслеживания рельефа местности была к тому времени реализована на F-111А и на разрабатываемом в СССР фронтовом бомбардировщике Т-6 (Су-24). Однако на этих машинах стояла гидромеханическая система управления, а сопряженный с бортовым компьютером автопилот обеспечивал выполнение полета по заданному маршруту. Новизна проекта РА-200 заключалась в применении более современного поколения аналоговой ЭДСУ, которая основываясь на более совершенной электронике и используя более гибкие алгоритмы управления, точнее и быстрее отслеживала изменения параметров полета. Ее применение позволило снизить массу и уменьшить количество механических элементов системы управления.
ЭДСУ Panavia-200 состояла из главного бортового компьютера и двух автопилотов: навигационного APFD и увеличения стабильности полета CSAS. Последний имел гироскопы и акселерометры, фиксирующие пространственное положение машины, а также линейные и угловые ускорения по трем осям. Разработанная европейцами ЭДСУ обеспечивала околозвуковой полет, следуя рельефу местности на высоте 60 м. На тот момент это был выдающийся результат – Су-24 и F-111А могли выполнять такой полет на высотах не ниже 100 м. Чтобы обеспечить надежную работу такой системы, применили ее дублирование, а на случай отказа электроники сохранили резервную тросовую проводку управления.
Прицельно-навигационная система (ПНС) состояла из ряда подсистем. Она обеспечивала определение местоположения самолета, выдавала информацию для ЭДСУ. Погрешность в самолетовождении должна была составлять 1,8-2 км за час полета. ПНС также вырабатывала данные для прицеливания при пуске ракет и сбросе бомб. Бомбометание (одиночно, залпом или серией) должно было проводиться как с горизонтального полета, так и со сложных видов маневра. Главную роль при этом играла многорежимная бортовая РЛС фирмы Texas Instruments. Она состояла из двух отдельных станций – GMR (Ground Mapping Radar) и TFR (Terrain Following Radar), антенны которых располагались одна над другой под радиопрозрачным носовым обтекателем. GMR предназначалась для обнаружения целей, в том числе воздушных, а также применения оружия по наземным. Дальность обнаружения наземных целей составляла 100-120 км. Она же сканировала наземные ориентиры, а полученные данные затем сопоставлялись компьютером с загружеными в его память параметрами. Потом эти данные передавались автопилоту, который выдавал команды для проводки самолета по маршруту. Станция TFR совместно с радиовысотомером и датчиками параметров полета служила для выполнения полета с огибанием рельефа местности. Она имела достаточно узкий конус направленности: ±8° в стороны, 10е вверх, 20° вниз и дальность обнаружения до 40 км. Станция была способна идентифицировать такие препятствия, как высоковольтные линии электропередач. Для отработки элементов бортового оборудования самолета было задействовано две летающие лаборатории на базе британских палубных бомбардировщиков Buccaneer.

Механизация крыла «Торнадо» в посадочной конфигурации


Турбулизаторы на киле «Торнадо» и створки реверса в рабочем положении
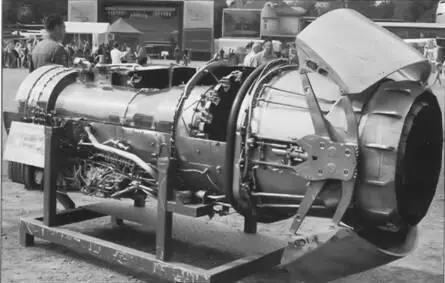

Препарированный двигатель RB199-34R и створки реверса левого двигателя в полетном положении
Для РА-200 разрабатывали весьма совершенную систему отображения информации. Наиболее важные данные о целях, прицельные марки и пилотажные данные выводились на индикатор на лобовом стекле HUD (Head-up Display). Тактическая обстановка, навигационные данные от РЛС, совмещенные с картой местности, отображались на дисплеях, размещенных по центру приборных досок в обеих кабинах. Другие данные, например, состояние оружия и самолетных систем, отображались в удобном для восприятия виде на универсальных дисплеях в задней кабине. В качестве резервных сохранили несколько традиционных стрелочных приборов.
Самолету предстояло нести до 8 т боевой нагрузки. Для ее размещения машину оснастили семью пилонами с универсальными замками. 3 из них находились под фюзеляжем (1 – по середине, 2 – по бокам), еще по паре – под каждой консолью крыла и могли поворачиваться, оставаясь параллельными потоку при изменении стреловидности крыла. В качестве артиллерийского вооружения решили использовать две 27-мм пушки IWKA фирмы Mauser с регулируемой скорострельностью 1000 или 1700 выстрелов в мин и боекомплектом по 180 снарядов на ствол.
Читать дальшеИнтервал:
Закладка: