Ричард Фейнман - 8. Квантовая механика I

- Название:8. Квантовая механика I
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Ричард Фейнман - 8. Квантовая механика I краткое содержание
8. Квантовая механика I - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:

Для полноты добавим еще следующее. Но не думайте, что это будет что-то страшно важное; если хотите, переходите, не читая, прямо к следующему параграфу. Надо сознаться, что то, что мы сказали, не совсем верно. Мы не можем на самом деле утверждать, что (4.9) и (4.10) обязаны привести к абсолютно одинаковым амплитудам. Одинаковыми должны оказаться только физические результаты; сами же амплитуды, могут отличаться на общий фазовый множитель типа e i d, не меняя результатов никаких расчетов, касающихся реального мира. Иначе говоря, вместо (4.11) единственное, что можно утверждать,— это

где d — какая-то вещественная постоянная величина. Смысл этого добавочного множителя е i d, конечно, в том, что амплитуды, которые мы получим, пользуясь матрицей R US , могут все отличаться на одну и ту же фазу (е - i d ) от амплитуд, которые получились бы из двух поворотов R UT и R TS . Но мы знаем, что если все амплитуды изменить на одинаковую фазу, то это ни на чем не скажется. Так что при желании можно этот фазовый множитель просто игнорировать. Оказывается, однако, что если определить нашу матрицу поворота особым образом, то этот фазовый множитель вообще не появится: б в (4.12) всегда будет нулем. Хотя это и не отражается на наших дальнейших рассуждениях, мы беремся это быстро доказать, пользуясь математической теоремой о детерминантах. [А если вы до сих пор мало знакомы с детерминантами, то не следите за доказательством и прямо переходите к определению (4.15).)
Во-первых, следует напомнить, что (4.11) — это математическое определение «произведения» двух матриц. (Просто очень удобно говорить «R US есть произведение R UT и R TS ».) Во-вторых, существует математическая теорема (которую для используемых здесь матриц 2X2 вы легко докажете), утверждающая, что детерминант «произведения» двух матриц есть произведение их детерминантов. Применив эту теорему к (4.12), получим

(Мы отбрасываем нижние индексы, они здесь ничего полезного нам не сообщают.) Да, слева стоит 2S! Вспомните, что мы имеем дело с матрицами 2x2; каждый член в матрице R US ki умножен на е i d , а каждый член в детерминанте (состоящий из двух множителей) получается умножением на е i 2 d . Извлечем из (4.13) корень и разделим на него (4.12):

Добавочный фазовый множитель исчез.
Дальше оказывается, что если мы хотим, чтобы все наши амплитуды в любом заданном представлении были нормированы (а это, как вы помните, означает, что 
то у всех матриц поворота детерминанты окажутся чисто мнимыми экспонентами, наподобие е i a . (Мы не будем этого доказывать; вы сами потом увидите, что это всегда так.) Значит, мы сможем, если захотим, выбрать все наши матрицы поворота R так, чтобы фаза их получалась однозначно, взяв Det R =1. Это будет делаться так. Пусть мы каким-то произвольным образом определили матрицу поворота R. Возьмем за правило «приводить» ее к «стандартной форме», определяя

Для получения однозначных фаз мы просто умножаем каждый член в R на один и тот же фазовый множитель. В дальнейшем мы будем всегда предполагать, что наши матрицы были приведены к «стандартной форме»; тогда мы сможем пользоваться прямо формулой (4.11) без каких-либо добавочных фазовых множителей.
§ 3. Повороты вокруг оси z
Теперь мы уже подготовлены к тому, чтобы отыскать матрицу преобразования R ji , связывающую два разных представления, Владея нашим правилом объединения поворотов и нашим предположением, что в пространстве нет предпочтительного направления, мы владеем ключом для отыскания матрицы любого произвольного поворота. Решение здесь только одно. Начнем с преобразования, которое отвечает повороту вокруг оси z. Пусть имеются два прибора S и Т, поставленных друг за другом вдоль одной прямой; оси их параллельны и смотрят из страницы на вас (фиг. 4.4, а).
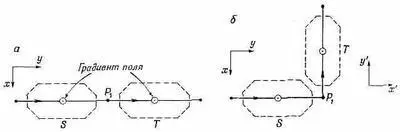
Фиг. 4.4. Поворот на 90° вокруг оси z.
Это их направление мы примем за ось z. Ясно, что если пучок в приборе S идет вверх (к + z), то то же будет и в аппарате Т. Точно так же, если он в S идет вниз, то и в Т он направится вниз. Положим, однако, что прибор Т был повернут на какой-то угол, но его ось, как и прежде, параллельна оси прибора S, как на фиг. 4.4, б. Интуитивно хочется сказать, что пучок (+) в S будет по-прежнему переходить в пучок (+) в Т, потому что и поля, и их градиенты характеризуются тем же физическим направлением. И это вполне правильно. Точно так же и пучок (-) в S будет переходить в пучок (-) в Т. Тот же результат применим для любой ориентации Т в плоскости ху прибора S. Что же отсюда следует для связи между С' + = <+T|y>, С' - =<- T |y> и С + =<+ S |y>, С - = <- S |y>? Можно подумать, что любой поворот вокруг оси z «системы отсчета» базисных состояний оставляет амплитуды С± пребывания «вверху» и «внизу» теми же, что и раньше, и написать С' + =С + и С' -= С - . Но это неверно. Все, что можно отсюда заключить,— это, что при таких поворотах вероятности оказаться в «верхнем» пучке приборов S и Т одинаковы, т. е.

Но мы не вправе утверждать, что фазы амплитуд, относящихся к прибору Т, не могут в двух различных ориентациях а и б (фиг. 4.4) различаться.
Пары приборов, показанных на фиг. 4.4, на самом деле отличаются друг от друга, в чем можно убедиться следующим образом. Предположим, что мы перед прибором S поставили другой, создающий чистое (+ x )-состояние. (Ось х направлена на рисунке вниз.) Эти частицы расщеплялись бы в S на пучки (+ z ) и (- z ), но на выходе S (в точке Р 1 ) оба пучка снова соединялись бы и восстанавливали состояние (+ х). Затем то же самое происходило бы в Т. Если бы за Т поставить третий прибор U, ось которого направлена по (+ х). как показано на фиг. 4.5, а, то все частицы пошли бы в пучок (+) прибора U.
Читать дальшеИнтервал:
Закладка: