Нихиль Будума - Основы глубокого обучения

- Название:Основы глубокого обучения
- Автор:
- Жанр:
- Издательство:Манн, Иванов и Фербер
- Год:2020
- Город:Москва
- ISBN:9785001464723
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Нихиль Будума - Основы глубокого обучения краткое содержание
Основы глубокого обучения - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
Задаем функцию predict_action, которая семплирует действие на основании выходного распределения вероятностей действия модели. Мы поддерживаем разные стратегии семплирования, о которых говорилось выше, чтобы достичь равновесия исследования и использования, в том числе жадную, ϵ-жадную и нормализованную ϵ-жадную стратегии.
Фиксация истории
Мы будем объединять градиенты запусков множества эпизодов, так что полезно будет записывать кортежи состояния, действия и вознаграждения. Для этого реализуем историю и память эпизода.
class EpisodeHistory(object):
def __init__(self):
self.states = []
self.actions = []
self.rewards = []
self.state_primes = []
self.discounted_returns = []
def add_to_history(self, state, action, reward,
state_prime):
self.states.append(state)
self.actions.append(action)
self.rewards.append(reward)
self.state_primes.append(state_prime)
class Memory(object):
def __init__(self):
self.states = []
self.actions = []
self.rewards = []
self.state_primes = []
self.discounted_returns = []
def reset_memory(self):
self.states = []
self.actions = []
self.rewards = []
self.state_primes = []
self.discounted_returns = []
def add_episode(self, episode):
self.states += episode.states
self.actions += episode.actions
self.rewards += episode.rewards
self.discounted_returns += episode.discounted_returns
Основная функция градиента по стратегиям
Соединим всё это в нашей основной функции, которая создаст среду OpenAI Gym для примера CartPole (тележка с шестом), задаст пример агента и заставит его взаимодействовать со средой CartPole и обучаться на ней.
def main(argv):
# Configure Settings (Конфигурируем настройки)
total_episodes = 5000
total_steps_max = 10000
epsilon_stop = 3000
train_frequency = 8
max_episode_length = 500
render_start = -1
should_render = False
explore_exploit_setting =
‘epsilon_greedy_annealed_1.0->0.001'
env = gym.make(‘CartPole-v0')
state_size = env.observation_space.shape[0] # 4 for
# CartPole-v0
num_actions = env.action_space.n # 2 for CartPole-v0
solved = False
with tf.Session() as session:
agent = PGAgent(session=session, state_size=state_size,
num_actions=num_actions,
hidden_size=16,
explore_exploit_setting=
explore_exploit_setting)
session.run(tf.global_variables_initializer())
episode_rewards = []
batch_losses = []
global_memory = Memory()
steps = 0
for i in tqdm.tqdm(range(total_episodes)):
state = env.reset()
episode_reward = 0.0
episode_history = EpisodeHistory()
epsilon_percentage = float(min(i/float(
epsilon_stop), 1.0))
for j in range(max_episode_length):
action = agent.predict_action(state,
epsilon_percentage)
state_prime, reward, terminal, _ =
env.step(action)
if (render_start > 0 and i >
render_start and should_render) \
or (solved and should_render):
env.render()
episode_history.add_to_history(
state, action, reward, state_prime)
state = state_prime
episode_reward += reward
steps += 1
if terminal:
episode_history.discounted_returns =
discount_rewards(
episode_history.rewards)
global_memory.add_episode(
episode_history)
if np.mod(i, train_frequency) == 0:
feed_dict = {
agent.reward_input: np.array(
global_memory.discounted_returns),
agent.action_input: np.array(
global_memory.actions),
agent.state: np.array(
global_memory.states)}
_, batch_loss = session.run(
[agent.train_step, agent.loss],
feed_dict=feed_dict)
batch_losses.append(batch_loss)
global_memory.reset_memory()
episode_rewards.append(episode_reward)
break
if i % 10:
if np.mean(episode_rewards[:-100]) > 100.0:
solved = True
else:
solved = False
Этот код обучит агента CartPole успешно и надежно удерживать шест в равновесии.
Работа PGAgent в примере с тележкой с шестом
Рисунок 9.6 — таблица средних вознаграждений нашего агента на каждом шаге обучения. Мы пробуем восемь разных методов семплирования, а лучший результат достигается при помощи нормализованной ϵ-жадной стратегии (от 1 до 0,001).
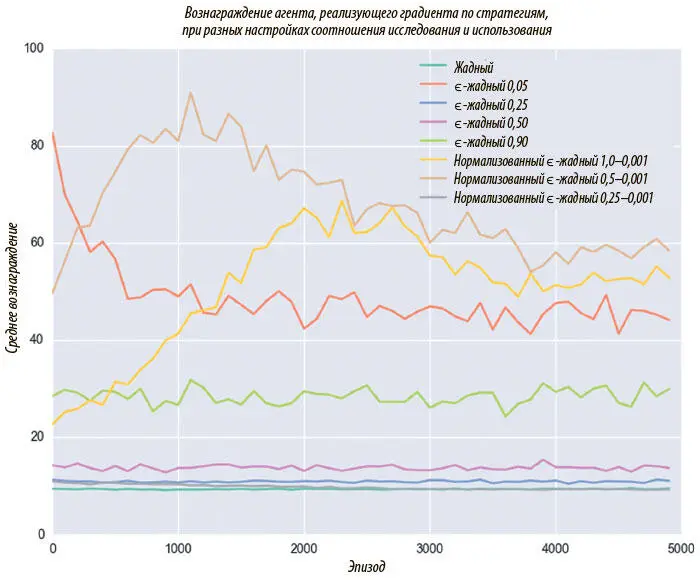
Рис. 9.6. Конфигурация соотношения исследования и использования влияет на скорость и успешность обучения
Отметим, что в целом стандартный ϵ-жадный алгоритм дает очень плохие результаты. Обсудим, почему так происходит. Если задано верхнее значение ϵ = 0,9, мы совершаем случайные действия 90% времени.
Даже если модель научится выполнять идеальные действия, это будет использовано всего в 10% случаев. А вот если значение ϵ низкое — 0,05, мы в подавляющем большинстве случаев совершаем действия, которые модель считает оптимальными. Эффективность выше, но велика вероятность скатиться к локальному максимуму вознаграждения, поскольку почти нет возможности исследовать другие стратегии.
Итак, ϵ-жадный алгоритм не дает хороших результатов ни при 0,05, ни при 0,9: исследованию уделяется либо слишком много, либо слишком мало внимания. Вот почему нормализация ϵ оказывается хорошей стратегией семплирования. Она позволяет модели сначала исследовать, а затем использовать, что необходимо для изучения хорошей стратегии.
Q-обучение и глубокие Q-сети
* * *
Q-обучение — категория модели с подкреплением, именуемая обучением ценности. Вместо непосредственного исследования стратегии мы будем усваивать ценности состояний и действий.
Q-обучение связано с исследованием Q-функции , которая отражает качество пары (состояние, действие). Q(s, a) — функция, которая рассчитывает максимальную дисконтированную будущую выгоду от совершения действия a в состоянии s.
Значение Q отражает ожидаемые долгосрочные выгоды, если мы в соответствующем состоянии и совершаем соответствующее действие, а затем идеально выполняем все последующие (чтобы получить максимальную ожидаемую будущую выгоду). Формально это можно выразить так:

Возможно, вы задаетесь вопросом: как узнать значения Q? Ведь даже людям тяжело понять, насколько хорошо то или иное действие, поскольку надо знать, как вы собираетесь поступать в будущем. Ожидаемые выгоды зависят от нашей долгосрочной стратегии. Это похоже на проблему курицы и яйца: чтобы оценить пару (состояние, действие), нужно знать все идеальные дальнейшие действия. А чтобы знать, какие будущие действия окажутся идеальными, нужно иметь точно рассчитанные стоимости состояния и действия.
Уравнение беллмана
Мы решаем эту дилемму, определяя значения Q как функцию от будущих значений Q. Такие отношения называются уравнением Беллмана, которое утверждает, что максимальная будущая выгода от действия a — текущая выгода плюс максимальная будущая на следующем шаге от совершения следующего действия a':

Это рекурсивное определение позволяет установить соответствие между значениями Q в прошлом и будущем, и уравнение удобно задает правило обновления. Мы можем обновить предыдущие значения Q так, чтобы они основывались на будущих. И здесь очень удачно, что мы точно знаем одно верное значение Q: это Q для самого последнего действия перед окончанием эпизода.
Для этого состояния мы точно знаем, что следующее действие привело к новому вознаграждению, и можем точно задать значения Q. Теперь можно использовать правило обновления для распространения этого значения на предыдущий шаг:
Читать дальшеИнтервал:
Закладка: