Владимир Живетин - Методы и средства обеспечения безопасности полета

- Название:Методы и средства обеспечения безопасности полета
- Автор:
- Жанр:
- Издательство:Изд-во Института проблем риска, Информационно-издательский центр «Бон Анца»
- Год:2010
- Город:Москва
- ISBN:978-5-98664-055-6, 978-5-903140-39-8
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Владимир Живетин - Методы и средства обеспечения безопасности полета краткое содержание
Методы и средства обеспечения безопасности полета - читать онлайн бесплатно ознакомительный отрывок
Интервал:
Закладка:
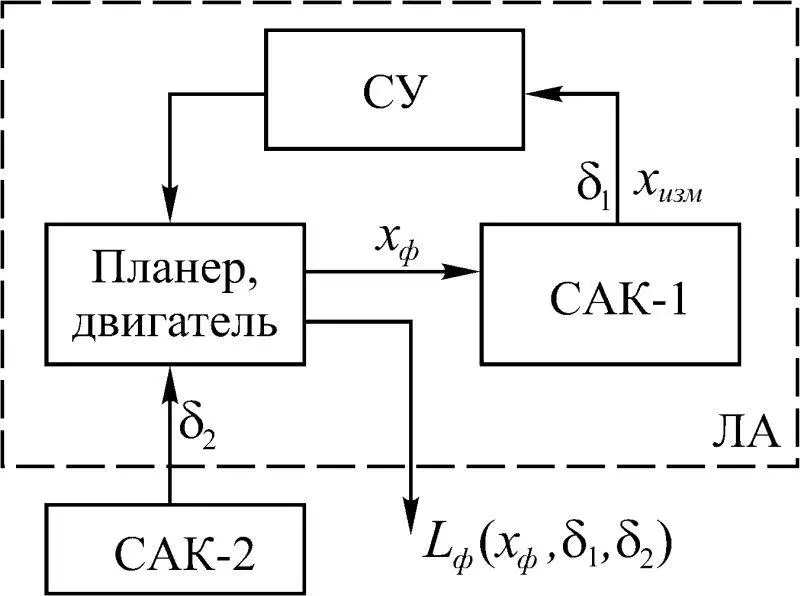
Рис. 1.31
Для фактической дальности полета имеем L ф = f 3(  , x iизм , … )
, x iизм , … )  , где фактическая величина сопротивления представляет собой функцию вида = f 4( x iф (δ 1), δ 2, …); δ 1= f 5((δ x i ) o , (δ x i ) ин , (δ x i ) м , …); δ 2= f 6(Δψ, …); (δ x i ) o – начальная погрешность измерения; (δ x i ) ин – инструментальная погрешность измерения; (δ x i ) м – методическая погрешность измерения; Δψ – погрешности производства.
, где фактическая величина сопротивления представляет собой функцию вида = f 4( x iф (δ 1), δ 2, …); δ 1= f 5((δ x i ) o , (δ x i ) ин , (δ x i ) м , …); δ 2= f 6(Δψ, …); (δ x i ) o – начальная погрешность измерения; (δ x i ) ин – инструментальная погрешность измерения; (δ x i ) м – методическая погрешность измерения; Δψ – погрешности производства.
Таким образом, согласно физической сути процессов, погрешности δ 1и δ 2функционирования САК-1 и САК-2 приводят к одной и той же итоговой погрешности, а именно к уменьшению оптимальной (максимальной) дальности на величину Δ L = L ф – L p = f 7(δ 1, δ 2, …). Уменьшая погрешности δ 1, δ 2до нуля, можно достичь теоретически Δ L  0. Однако практически это невозможно по техническим и экономическим причинам.
0. Однако практически это невозможно по техническим и экономическим причинам.
В рассматриваемой ситуации для решения проблемы формирования замкнутого контура необходимо определить соотношения между δ 1и δ 2, т. е., по существу, определить что первично, и что нужно уменьшать, чтобы при малых затратах на производство планера и двигателя, с одной стороны, и бортового оборудования – с другой, достичь L p с погрешностью в заданных пределах.
Для решения этой проблемы нужен показатель, характеризуемый численной величиной, с помощью которого учитывается роль каждой из погрешностей δ 1, δ 2. В качестве такого показателя выберем вероятности Р 1( А 1), Р 2( А 2), Р 3( А 3), приведенные выше, которые в рассматриваемом случае запишем в виде

где L изм = L ф +δ 1 L изм , L ф = М { L ф }+Δ L (δ 1, δ 2).
Используя (1.43), можно показать, что, уменьшая погрешности δ 2производства аэродинамических поверхностей и увеличивая погрешности функционирования информационно-измерительных систем параметров траектории движения δ 1, или наоборот, можно обеспечить условие Р i =const. Отметим, что увеличение погрешностей δ 2производства ЛА снижает его стоимость, а уменьшение δ 1повышает стоимость информационно-измерительной системы.
Таким образом, введен показатель, представляющий возможность обоснованно назначать допустимые величины погрешностей производства геометрических размеров ЛА, а в необходимых случаях перераспределять погрешности δ 1и δ 2, обеспечивая заданные значения Р i ( i =1,2,3), а в итоге показатели риска, в том числе финансовые потери.
При разработке математических моделей, при вычислении P i ( A i ), как правило, рассматривают следующие задачи.
1. Выбор и обоснование математической модели для данных условий.
2. Получение коэффициентов выбранной модели.
В зависимости от свойств среды, геометрии самолета, конкретных условий движения, а также от свойств и точности информации, получаемых на выходе таких моделей, они описываются с различной степенью детализации, как правило, с помощью дифференциальных уравнений, в том числе и в частных производных.
В некоторых ситуациях процесс создания моделей представляет собой многоэтапную процедуру. Так, модели самолета, двигателя и его систем, создаваемых с учетом летчика в контуре управления самолетом, оцениваются путем автоматизированного прогона их на ЭВМ с целью получения набора характеристик (времени разгона и торможения самолета, статической и динамической устойчивости и управляемости и т. п.) [37, 38]. В дальнейшем эти вычисленные характеристики сравниваются с эталонными, полученными путем обработки результатов летных испытаний. Ключевой в этих исследованиях является цифровая модель действий летчика при управлении самолетом [14, 30].
Рассмотрим модель для оценки экономического риска на структурно-функциональном уровне, которую можно представить обобщенно в следующем виде (рис. 1.32).
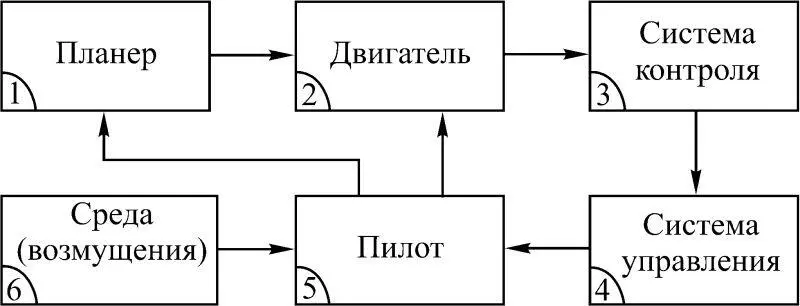
Рис. 1.32
Ясно, что с целью снижения экономических потерь на этапе эксплуатации ЛА необходимо выбрать такие модели на этапе НИР и ОКР, которые обладают минимальными ошибками. Возникает противоречие между требуемой точностью модели и затратами на ее создание, разрешить которое можно, используя показатели технико-экономического риска, включающие затраты на проведение НИР и ОКР, которые повышаются при использовании высокоточных моделей. При этом доходы от эксплуатации также повышаются в связи с повышением точности полученных результатов по выбору параметров как самой системы, так и параметров траектории движения.
Так, в рамках решаемой задачи обеспечения оптимальной дальности полета необходимо учитывать все этапы и соответствующие режимы полета, т. е. рассматривать системный принцип проектирования, производства и эксплуатации (системная авиация).
1.8. Технико-экономические потери на этапе эксплуатации
Анализ причин возникновения и способов нейтрализации риска в процессе эксплуатации ЛА позволяет сформулировать следующее:
– уровень риска в полете на современном ЛА определяется уровнем свойств и состоянием всего авиационного комплекса, включая: ЛА, экипаж, бортовые системы управления ЛА и обеспечение жизнедеятельности, наземные средства руководства полетом;
– необходимый уровень риска обеспечивается высоким уровнем знаний характеристик ЛА и условий полета, в том числе состояния среды, в которой протекает полет;
– при рассмотрении проблем моделирования риска необходимо учитывать характер многих закономерностей, имеющих место в процессе функционирования авиационного комплекса;
– ведущая роль в благоприятном завершении полета принадлежит системе «ЛА – экипаж».
Эксплуатационный риск– векторная величина, т. е. многомерная характеристика, каждая компонента которой оценивается разными службами, людьми (организующими полет или участвующими в нем) различным образом. При этом эксплуатационный риск включает в себя следующие виды рисков:
– производственные, связанные с исполнением конструкции ЛА, двигателя и бортового оборудования;
– технические, связанные с бортовым оборудованием, которое обеспечивает предотвращение выхода из области допустимых состояний;
Читать дальшеИнтервал:
Закладка: