Ричард Фейнман - 7. Физика сплошных сред

- Название:7. Физика сплошных сред
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Ричард Фейнман - 7. Физика сплошных сред краткое содержание
7. Физика сплошных сред - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
т. е. появилось дифференциальное уравнение для синуса. Таким образом, для малых отклонений кривая такого продольно изогнутого стержня представляет синусоиду. «Длина волны» l. этой синусоиды в два раза больше расстояния L между концами. Если изгиб невелик, она просто равна удвоенной длине неизогнутого стержня. Таким образом, получается кривая
Беря вторую производную, находим
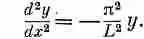
Сравнивая это с (38.45), видим, что сила равна

Для малого продольного изгиба сила не зависит от перемещения у!
Физически же получается вот что. Если сила F меньше определяемой уравнением (38.46), то никакого продольного изгиба не происходит. Но если она хоть немного больше этой силы, то балка внезапно и очень сильно согнется, т. е. под действием сил, превышающих критическую величину p 2 YI/L 2 (часто называемую «силой Эйлера»), балка будет «гнуться». Если на втором этаже здания разместить такой груз, что нагрузка на поддерживающие колонны превысит силу Эйлера, то здание рухнет. Другая область, где очень важны продольно изгибающие силы,— это космические ракеты. С одной стороны, ракета должна выдерживать свой вес на стартовой площадке и вынести напряжения во время ускорения, а с другой — очень важно свести вес всей конструкции до минимума, чтобы полезная нагрузка и полезная мощность двигателей были как можно больше.
Фактически превышение силы Эйлера вовсе не означает, что после этого балка полностью разрушится. Когда отклонение становится большим, сила благодаря члену (dz/dx) 2 в уравнении (38.38), которым мы пренебрегли, будет на самом деле больше вычисленной. Чтобы найти силы при большом продольном изгибании стержня, мы должны вернуться к точному уравнению (38.44), которое получалось до использования приближенной связи между R и y.
Уравнение (38.44) имеет довольно простые геометрические свойства. Решается оно немного сложнее, но зато гораздо интереснее. Вместо того чтобы описывать кривую через х и у, можно воспользоваться двумя новыми переменными:
S — расстоянием вдоль кривой и
q— наклоном касательной к кривой (фиг. 38.17.)
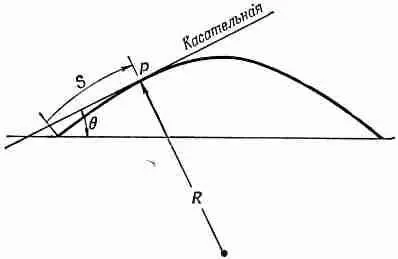
Фиг. 38.17. Координаты кривой продольно изогнутой балки S и q .
Тогда кривизна будет равна скорости изменения угла с расстоянием

Поэтому точное уравнение (38.44) можно записать в виде
После взятия производной этого уравнения по S и замены dy/dS на sinq получим

[Если углы q малы, то мы снова приходим к уравнению (38.45), стало быть здесь все в порядке.
Не знаю, можете ли вы еще удивляться, но уравнение (38.47) получилось в точности таким же, как и для колебаний маятника с большой амплитудой (разумеется, с заменой F/YI другой постоянной). Еще раньше, в гл. 9 (вып. 1), мы узнали, как находить решение такого уравнения численным методом. В ответе вы получите очаровательную кривую. На фиг. 38.18 показаны три кривые для разных значений постоянной F/YI.
* Кстати, точно такое же уравнение возникает и в других физических ситуациях: например, в мениске на поверхности жидкости, заключенной между двумя параллельными стенками, а поэтому можно воспользоваться тем же самым геометрическим рассмотрением.
* Решение его можно выразить также через особые функции, называемые «эллиптическими функциями Якоби», которые когда-то раз навсегда были вычислены и протабулированы.
* Это и есть момент инерции пластинки единичной плотности и с единичной площадью сечения
Глава 39
УПРУГИЕ МАТЕРИАЛЫ
§ 1. Тензор деформации
§ 2. Тензор упругости
§ З. Движения в упругом теле
§ 4. Неупругое поведение
§ 5. Вычисление упругих постоянных
§ 1. Тензор деформации
В предыдущей главе мы говорили о возмущениях упругих тел в простых случаях. В этой главе мы посмотрим, что может происходить внутри упругого материала в общем случае. Как описать условия напряжения и деформации в большом куске желе, скрученном и сжатом каким-то очень сложным образом? Для этого необходимо описать локальную деформацию в каждой точке упругого тела, а это можно сделать, задав в ней набор шести чисел — компонент симметричного тензора. Ранее (в гл. 31) мы говорили о тензоре напряжений, теперь же нам потребуется тензор деформации.
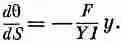
Предположим, что мы взяли недеформированный материал и, прикладывая напряжение, наблюдаем за движением маленького пятнышка примеси, попавшей внутрь. Пятнышко, которое вначале находилось в точке Р и имело положение г=(x, у, z), передвигается в новую точку Р', т. е. в положение r'= (х', у', z'), как это показано на фиг. 39.1.
Фиг. 39.1. Пятнышко примеси в материале из точки Р недеформированного кубика после деформации перемещается в точку Р'.
Мы будем обозначать через и вектор перемещения из точки Р в точку Р', т. е.
u = r'-r.(39.1)
Перемещение и зависит, конечно, от точки Р, из которой оно выходит так, что и есть векторная функция от г или от (х, у, z).
Сначала рассмотрим простейший случай, когда деформация по всему материалу постоянна, т. е. то, что называется однородной деформацией. Предположим, например, что мы взяли балку из какого-то материала и равномерно ее растянули. Иначе говоря, мы просто равномерно изменили ее размер в одном направлении, скажем в направлении оси х (фиг. 39.2).
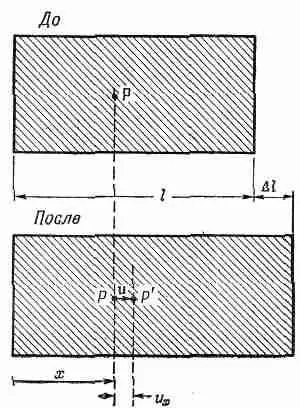
Фиг. 39.2. Однородная деформация растяжения.
Читать дальшеИнтервал:
Закладка: