Ричард Фейнман - 2a. Пространство. Время. Движение

- Название:2a. Пространство. Время. Движение
- Автор:
- Жанр:
- Издательство:неизвестно
- Год:неизвестен
- ISBN:нет данных
- Рейтинг:
- Избранное:Добавить в избранное
-
Отзывы:
-
Ваша оценка:
Ричард Фейнман - 2a. Пространство. Время. Движение краткое содержание
2a. Пространство. Время. Движение - читать онлайн бесплатно полную версию (весь текст целиком)
Интервал:
Закладка:
х = R cosq, y=Rsinq.
Что можно сказать об ускорении? Чему равна x-составляющая ускорения, d 2 x/dt 2 . Н айти эту величину можно чисто геометрически: она равна величине ускорения, умноженной на косинус угла проекции; перед полученным выражением надо поставить знак минус, потому что ускорение направлено к центру:
а х =- acosq=-wRcosq=-w 2 0 х. (21.7)
Иными словами, когда частица движется по окружности, горизонтальная составляющая движения имеет ускорение, пропорциональное горизонтальному смещению от центра. Конечно, мы знаем решения для случая движения по окружности: x=Rcos w 0 t. Уравнение (21.7) не содержит радиуса окружности; оно одинаково при движении по любой окружности при одинаковой w 0.
Таким образом, имеется несколько причин, по которым следует ожидать, что отклонение грузика на пружинке окажется пропорциональным cosw 0t и движение будет выглядеть так, как если бы мы следили за x-координатой частицы, движущейся по окружности с угловой скоростью w 0. Проверить это можно, поставив опыт, чтобы показать, что движение грузика вверх-вниз на пружинке в точности соответствует движению точки по окружности. На фиг. 21.3 свет дуговой лампы проектирует на экран тени движущихся рядом воткнутой во вращающийся диск иголки и вертикально колеблющегося груза.
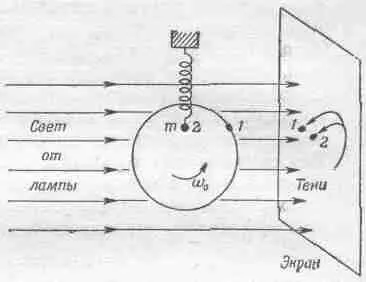
Фиг. 21.3. Демонстрация эквивалентности простого гармонического движения и равномерного движения по окружности.
Если вовремя и с нужного места заставить грузик колебаться, а потом осторожно подобрать скорость движения диска так, чтобы частоты их движений совпали, тени на экране будут точно следовать одна за другой. Вот еще способ убедиться в том, что, находя численное решение, мы почти вплотную подошли к косинусу.
Здесь можно подчеркнуть, что поскольку математика равномерного движения по окружности очень сходна с математикой колебательного движения вверх-вниз, то анализ колебательных движений очень упростится, если представить это движение как проекцию движения по окружности. Иначе говоря, мы можем дополнить уравнение (21.2), казалось бы, совершенно лишним уравнением для у и рассматривать оба уравнения совместно. Проделав это, мы сведем одномерные колебания к движению по окружности, что избавит нас от решения дифференциального уравнения. Можно сделать еще один трюк — ввести комплексные числа, но об этом в следующей главе.
§ 4. Начальные условия
Давайте выясним, какой смысл имеют А и В или а и D. Конечно, они показывают, как началось движение. Если движение начнется с малого отклонения, мы получим один тип колебаний; если слегка растянуть пружинку, а потом ударить по грузику — другой. Постоянные А и В или а и D, или какие-нибудь две другие постоянные определяются обстоятельствами, при которых началось движение, или, как обычно говорят, начальными условиями. Нужно научиться определять постоянные, исходя из начальных условий. Хотя для этого можно использовать любое из соотношений (21.6), лучше всего иметь дело с (21.6в). Пусть в начальный момент t=0 грузик смещен от положения равновесия на величину х 0 и имеет скорость v 0 . Это самая общая ситуация, какую только можно придумать. (Нельзя задать начального ускорения, потому что оно зависит от свойств пружины; мы можем распорядиться только величиной х 0 .) Вычислим теперь А и В. Начнем с уравнения для
х=Acosw o t+B sin w 0t;
поскольку нам понадобится и скорость, продифференцируем х и получим
v=- w 0Asin w 0t+ w 0Bcos w 0t.
Эти выражения справедливы для всех t, но у нас есть дополнительные сведения о величинах х и v при t=0. Таким образом, если положить t=0, мы должны получить слева х 0 и v 0 , ибо это то, во что превращаются х и v при t=0. Кроме того, мы знаем, что косинус нуля равен единице, а синус нуля равен нулю. Следовательно,
х 0 =А · 1+В · 0=А
и
v u =-w 0A·0+ w 0B·1= w 0B.
Таким образом, в этом частном случае
А=х 0 , В=v 0 /w 0 .
Зная А и В, мы можем, если пожелаем, найти а и D.
Итак, задача о движении осциллятора решена, но есть одна интересная вещь, которую надо проверить. Надо выяснить, сохраняется ли энергия. Если нет сил трения, то энергия должна сохраняться. Сейчас нам удобно использовать формулы
х=a cos( w ot+D) и v=-w 0asin( w 0t+D).
Давайте найдем кинетическую энергию Т и потенциальную энергию U . Потенциальная энергия в произвольный момент времени равна 1/ 2 kx 2 , где х — смещение, a k — постоянная упругости пружинки. Подставляя вместо х написанное выше выражение, найдем
U= 1 / 2 kx 2 = 1 / 2 ka 2 cos 2( w 0t+D).
Разумеется, потенциальная энергия зависит от времени; она всегда положительна, это тоже понятно: ведь потенциальная энергия — это энергия пружины, а она изменяется вместе с х. Кинетическая энергия равна 1 / 2 mv 2 ; используя выражение для v, получаем
Т = 1 / 2 mv 2 = 1 / 2 mw 2 0 a 2 sin 2 (w 0 t+D ).
Кинетическая энергия равна нулю при максимальном х, ибо в этом случае грузик останавливается; когда же грузик проходит положение равновесия (x=0), то кинетическая энергия достигает максимума, потому что именно тогда грузик движется быстрее всего. Изменение кинетической энергии, таким образом, противоположно изменению потенциальной энергии. Полная энергия должна быть постоянной. Действительно, если вспомнить, что k=mw 2 0 , то
T+U= 1/ 2m w 2 0а 2[cos 2( w 0t+D)+sin 2( w 0t+D)] = 1/ 2rn w 2 0a 2.
Энергия зависит от квадрата амплитуды: если увеличить амплитуду колебания вдвое, то энергия возрастет вчетверо. Средняя потенциальная энергия равна половине максимальной и, следовательно, половине полной; средняя кинетическая энергия также равна половине полной энергии.
§ 5. Колебания под действием внешней силы
Нам остается рассмотреть колебания гармонического осциллятора под действием внешней силы. Движение в этом случае описывается уравнением
md 2 x/dt 2 =-kx+F(t). (21.8)
Давайте подумаем, как будет вести себя грузик при этих обстоятельствах. Внешняя движущая сила может зависеть от времени каким угодно образом. Начнем с простейшей зависимости. Предположим, что сила осциллирует
Читать дальшеИнтервал:
Закладка: